ロボット開発概要
ROS 1/2やHW選定、四駆・アーム型ロボットについて
ROS とは? (ROS 1/2共通)
ROS 1に含まれる内容
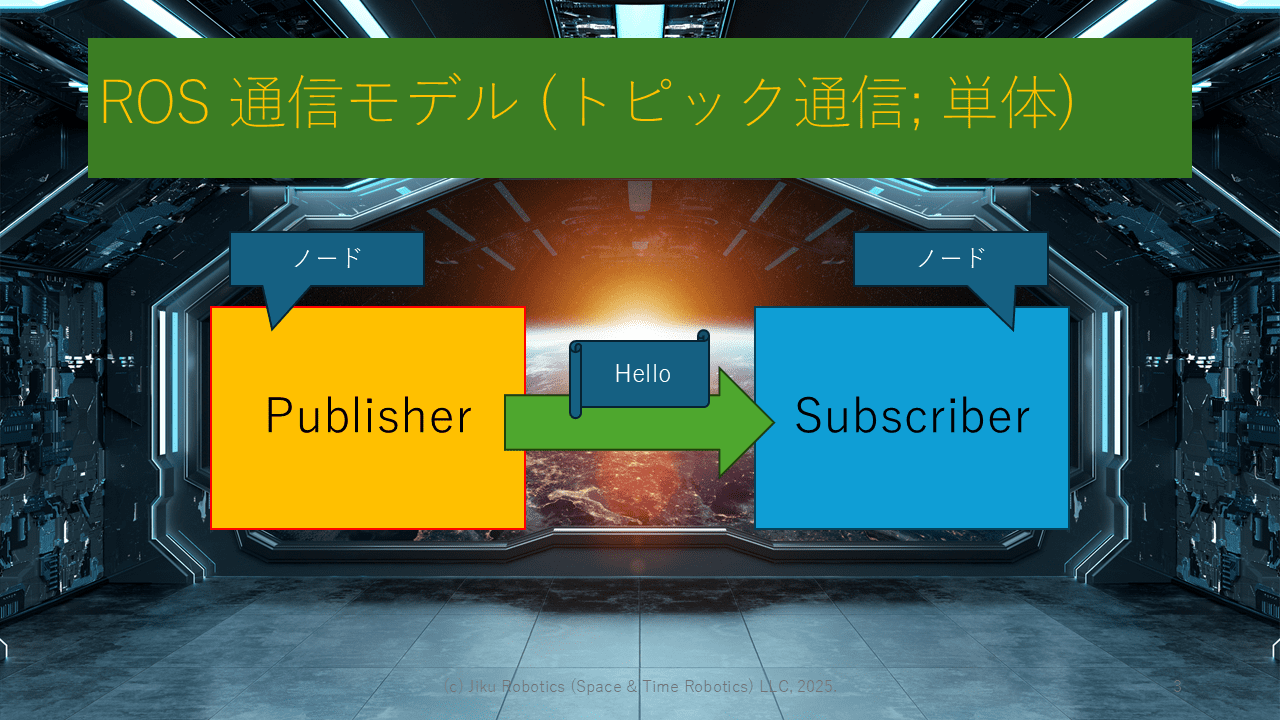
ROS 通信モデル
トピック通信 (単体)
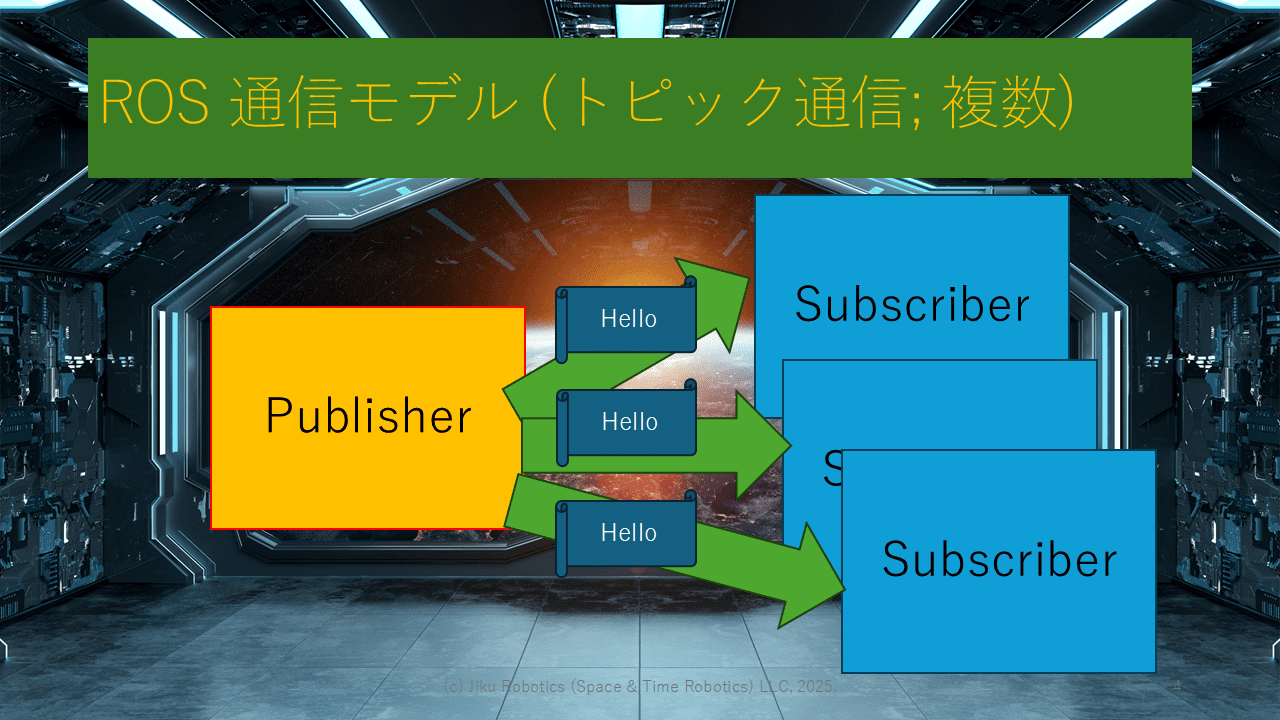
トピック通信 (複数)
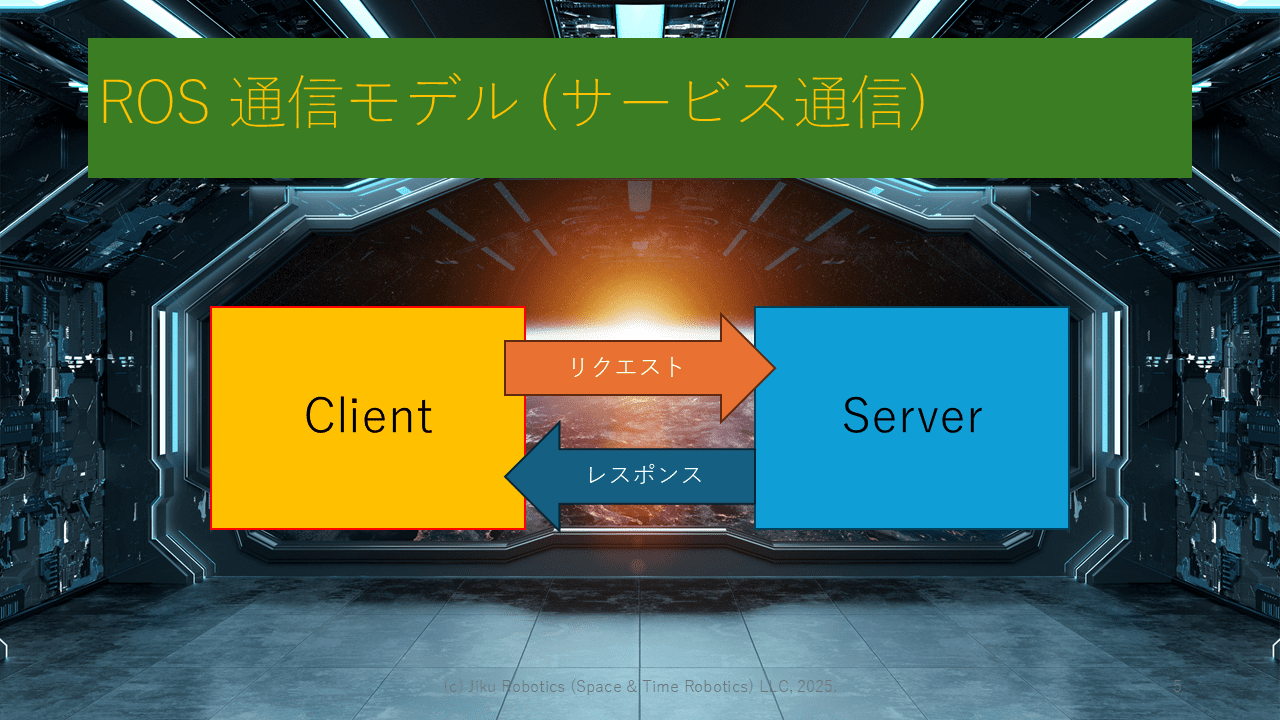
サービス通信
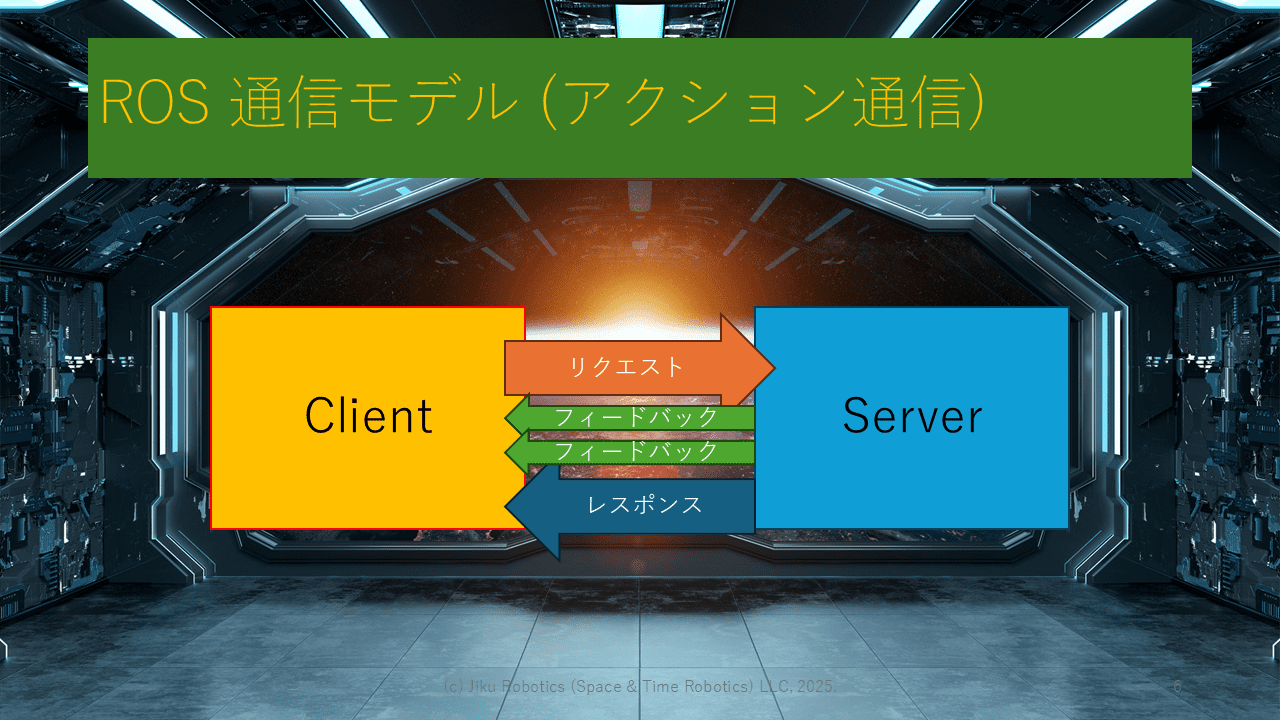
アクション通信
比較

Space & Time Robotics
ROS とは? (ROS 1/2共通)
•Robot Operating Systemの略 (OSと名が付くが、実際には主にLinux上に載るミドルウェアである)
•ロボットを制御するための仕組み
•開発ツールやライブラリーが含まれている
•オープンソースのソフトウェア・プラットフォーム
•Linux系OS上を中心に動く
•世界中の人が使用している
•開発言語: C++、Python等
•RTミドルウェア(RTM)との比較:
•RTMは、Winでも動くが、国内団体が開発したものが多い
•RTMはGUIでの開発だが、ROSはCUIが基本である
→ 世界展開は、ROS程でない (英語のドキュメントやチュートリアルが少ないため)
ROS 1に含まれる内容
ROS 通信モデル
トピック通信 (単体)
トピック通信 (複数)
サービス通信
アクション通信
比較
| 種類 | 特徴 | 用途 |
|---|---|---|
| トピック通信 | 連続データ 多対多通信可能 |
センサーデータ ロボット呼び出し状態 |
| サービス通信 | 短時間処理 | 単純呼び出し 状態把握 |
| アクション通信 | 複雑 長時間動作 |
ロボット処理実行 |
We use cookies to improve your experience on our site. By using our site, you consent to cookies.
Websites store cookies to enhance functionality and personalise your experience. You can manage your preferences, but blocking some cookies may impact site performance and services.
Essential cookies enable basic functions and are necessary for the proper function of the website.
These cookies are needed for adding comments on this website.
Google reCAPTCHA helps protect websites from spam and abuse by verifying user interactions through challenges.
Statistics cookies collect information anonymously. This information helps us understand how visitors use our website.
Google Analytics is a powerful tool that tracks and analyzes website traffic for informed marketing decisions.
Service URL: policies.google.com (opens in a new window)