
ロボット開発概要
ROS 1/2やHW選定、四駆・アーム型ロボットについて
ROS とは? (ROS 1/2共通)
ROS 1に含まれる内容
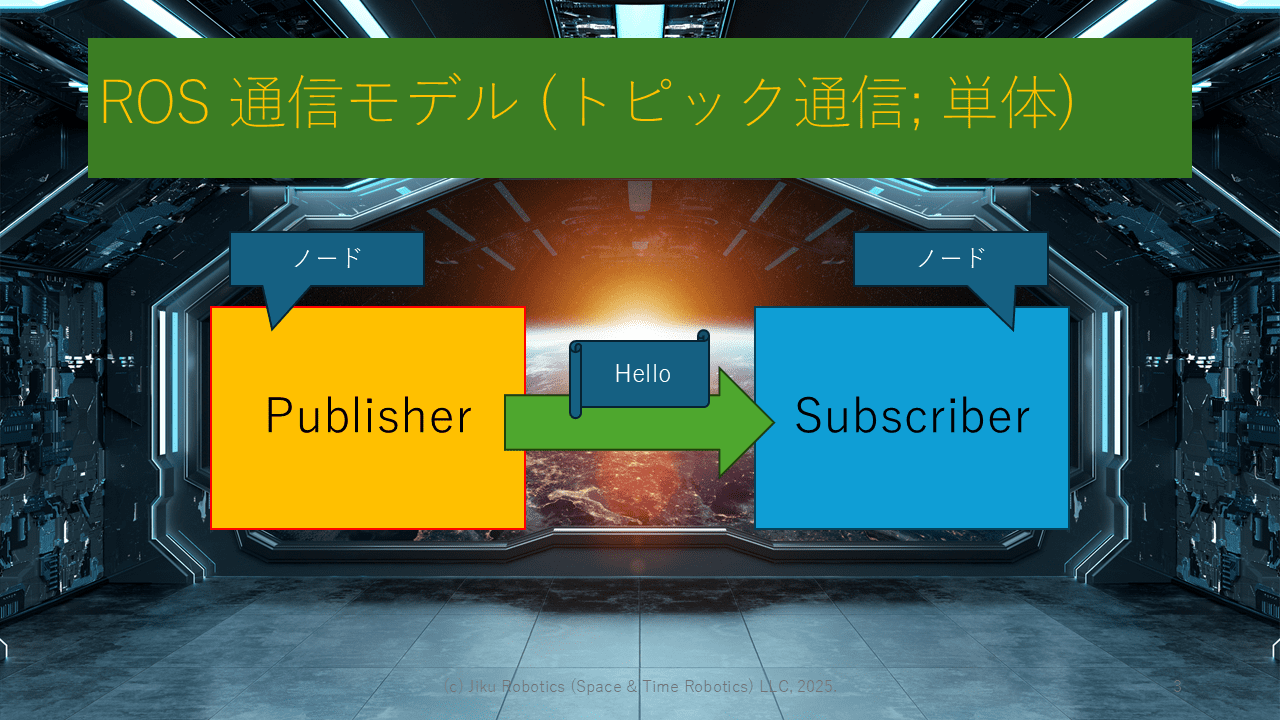
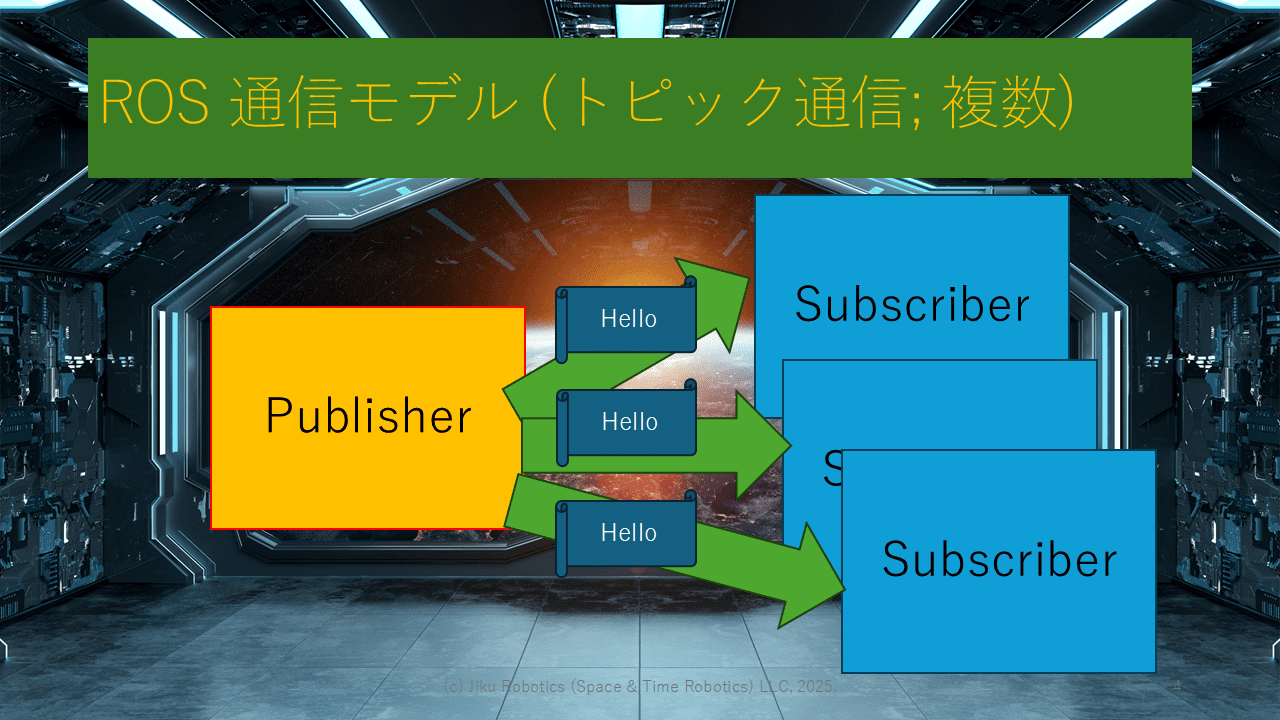
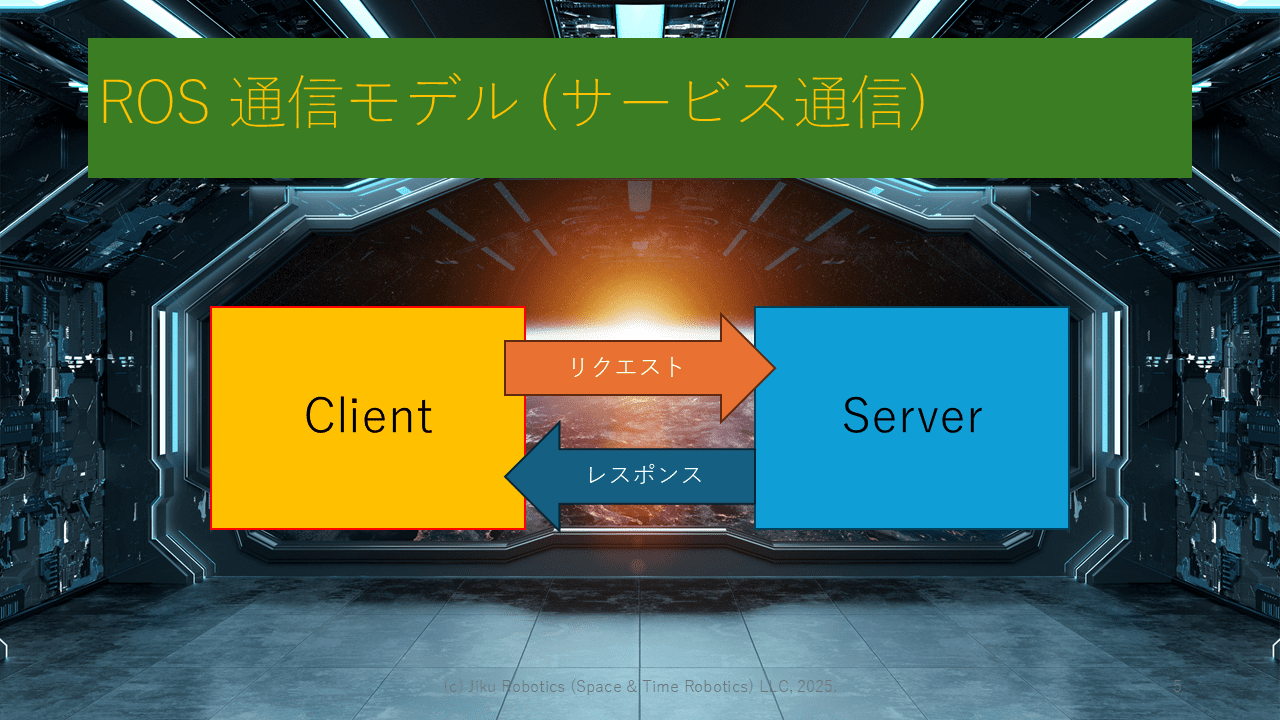
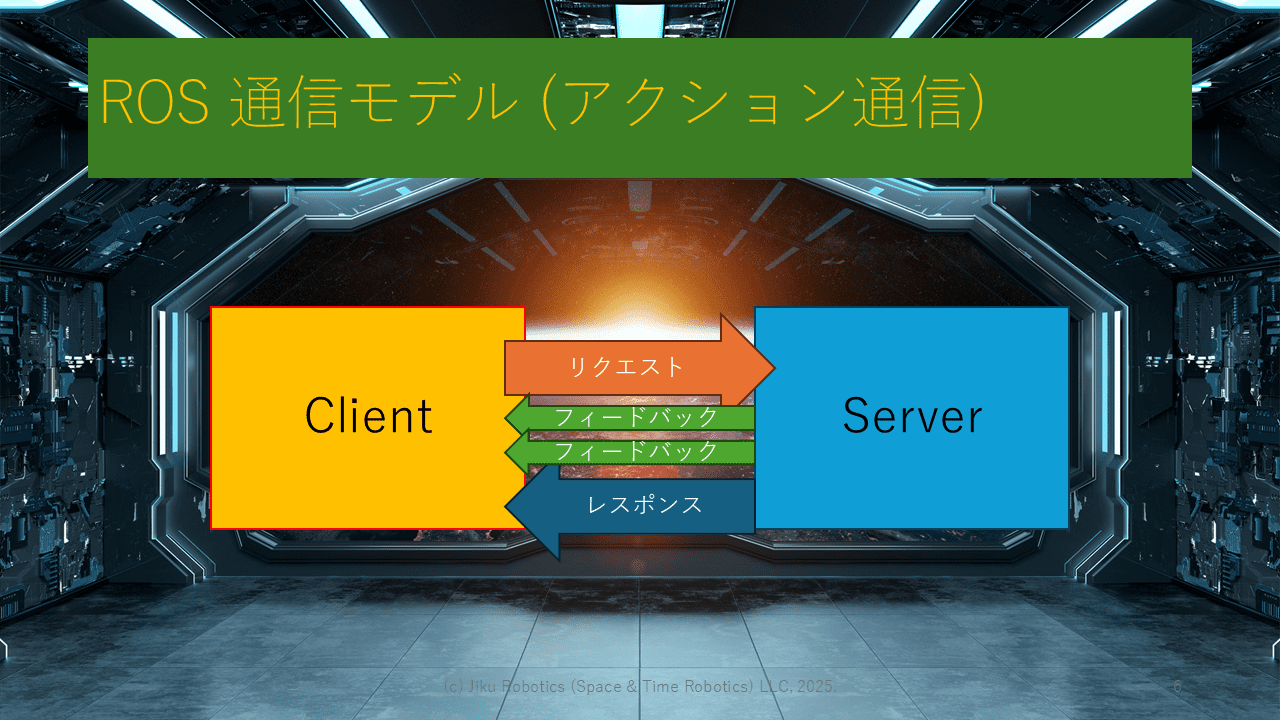
ROS 通信モデル
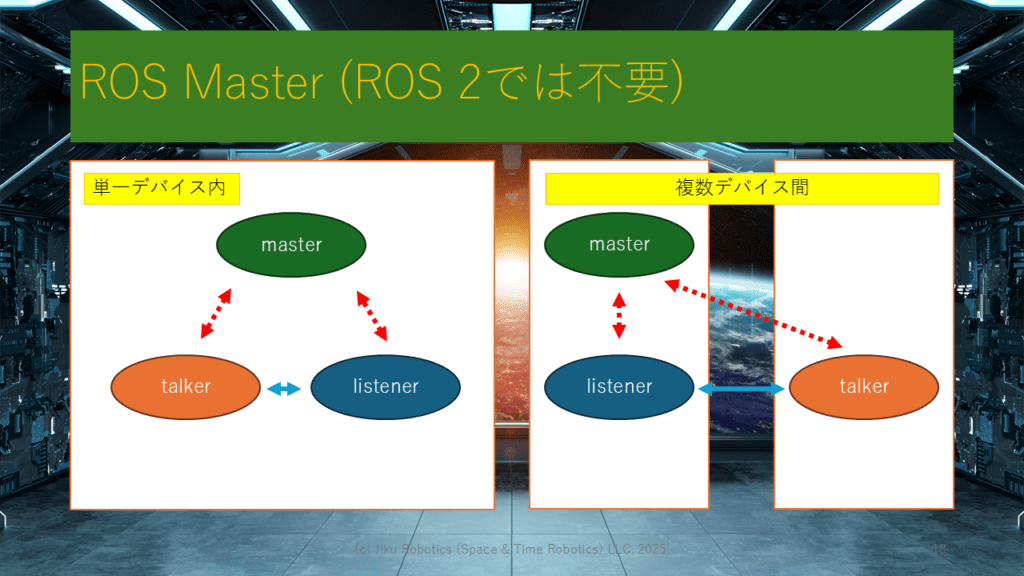
トピック通信 (単体)
トピック通信 (複数)
サービス通信
アクション通信
ROS 通信比較
catkin とは? (ROS 1のみ)
rviz とは? (ROS 1/2 共通)
LiDARとは? (ROS 1/2 共通)
SLAM とは? (ROS 1/2 共通)
Gazebo とは? (ROS 1/2 共通)
ROSを用いた開発手順 (ROS 1/2 共通)

ROS 2の概要
複数台ロボット制御
ROS 1からの変更点
ROS 1からの変更点
colcon とは? (ROS 2のみ)
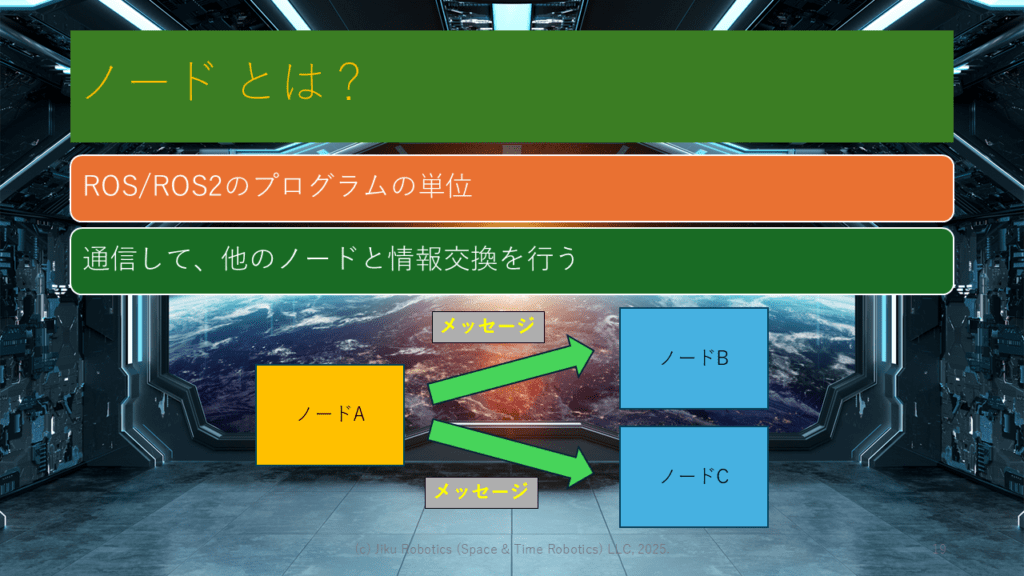
ノード とは?
ROS 1/2 のパラメーター機能の違い
別マシンとの接続
通信の相違
ROS時刻
対応OS
組み込みシステムでの利用
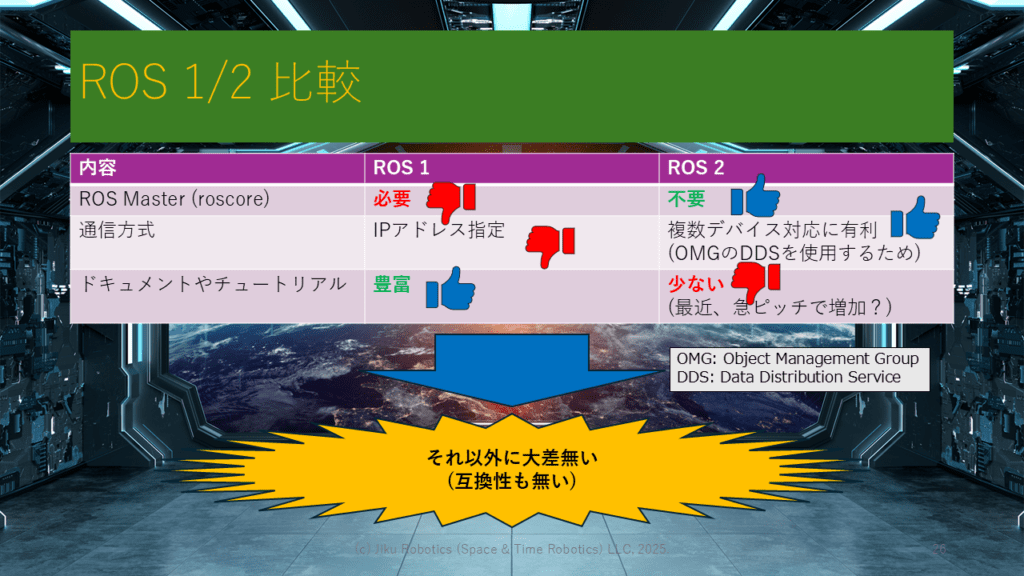
ROS 1/2 比較
ROS 2で、出来る事
ROS 2で、出来ない事・課題
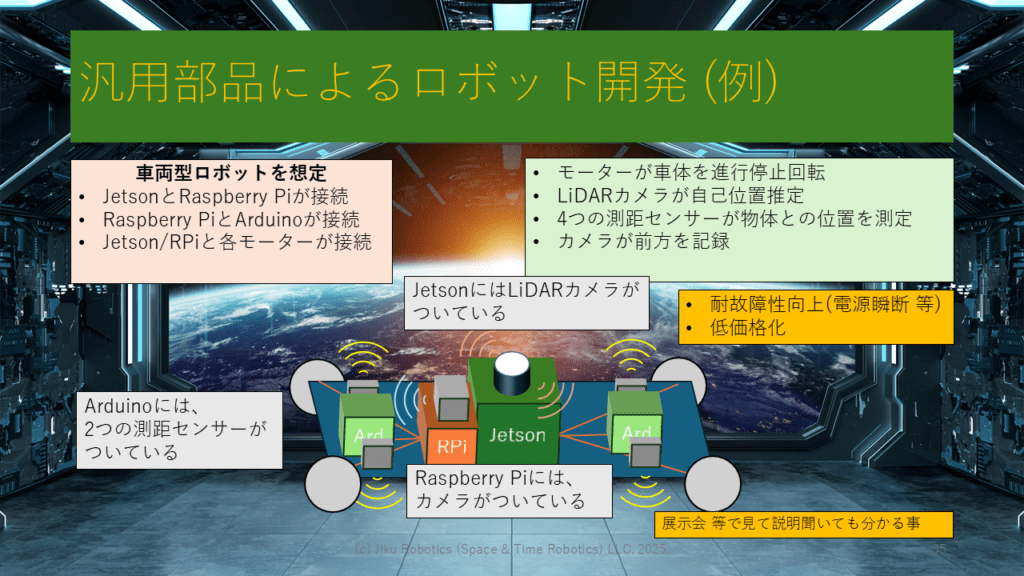
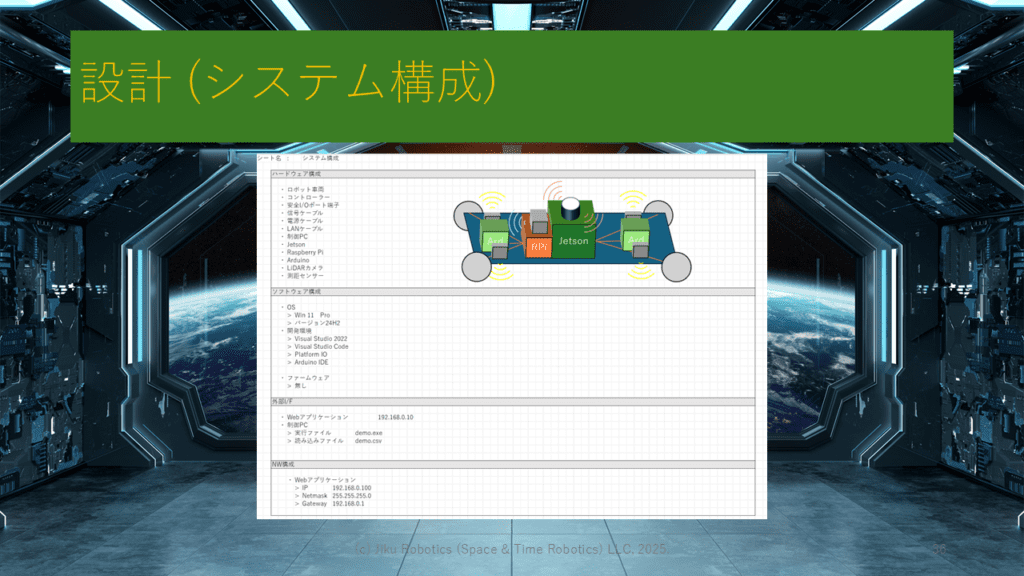
汎用部品によるロボット開発 (例)
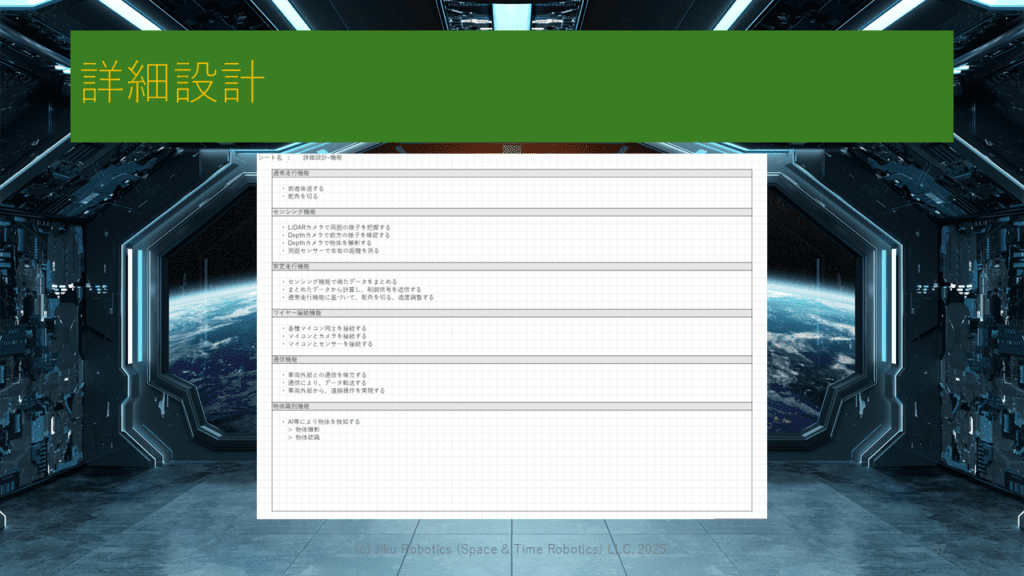
詳細設計
必要な物理性能
Raspberry Pi とは?
Raspberry Piの種類
Raspberry Pi選定で気を付ける事
Raspberry Pi (価格)