
技術
ロボティクス関連で、感じたこと等を載せています。
ロボット開発について , ロボットやAI、資格の今後の予想 , Pub-Sub通信 , turtlesim , ロボット開発について (実例),
Linuxを外付けストレージから起動 , VSCode環境構築, #include <Arduino.h>ができない場合の直し方, DockerでROS 2環境整備
ROS 2でturtlesim, Unity起動, 自作PC起動修復, ROSとUnityの連携, URDFモデルシミュレーション, 様々なURDFモデル, URDFアームモデル
人間型ロボット3Dプリント, 人間型ロボット関節造形組み立て, タイムトラベル・シミュレーション, 双腕完成, 謎: ロボットに心を搭載する方法, 人間型ロボット足関節組み立て, 人間型ロボット両脚組み立て, サーボモーター動作 等, 人間型ロボット全身組み立て
2024/6/21
ロボット開発についての資料を作ったので、載せます。
私が作りましたし、別に、ここまでならば、内容はネット公開情報でも分かると思いますから載せます。
デザインは、主にマイクロソフト365?に標準搭載のモノを使っています。
マイクロソフトの自称で、Web上のものでない・引用であるならば(米国法では)使ってもよいみたいに、
マイクロソフト365のPPTで、画像を挿入する時の説明で、あると思います。
そして、マイクロソフトは米国の会社ですから、そのままにします。

ロボット開発についてです。
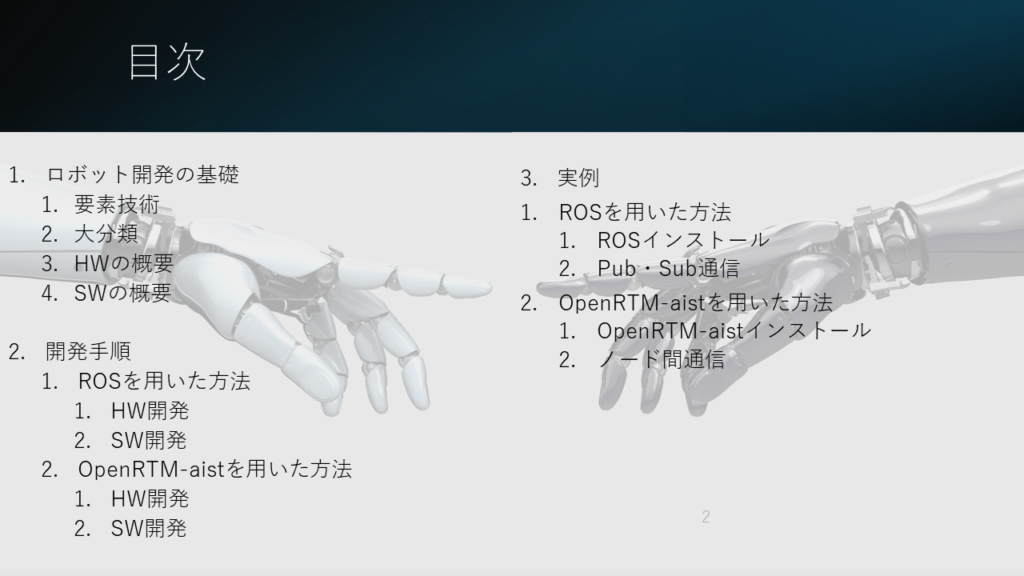
目次は次の通りです。
- ロボット開発の基礎
- 要素技術
- 大分類
- HWの概要
- SWの概要
- 開発手順
- ROSを用いた方法
- HW開発
- SW開発
- OpenRTM-aistを用いた方法
- HW開発
- SW開発
- ROSを用いた方法

1. ロボット開発の基礎
要素技術、大分類、HWの概要、SWの概要
要素技術
ロボットは次のような要素技術で動く
- IT (システムやプログラム)
- 電気電子 (WiFiや配線)
- 機械 (モーターやギア)

大分類
ロボットは次に分類できる
- HW (ハードウェア)
- 機械、電気電子的な要素
- SW (ソフトウェア)
- IT的な要素
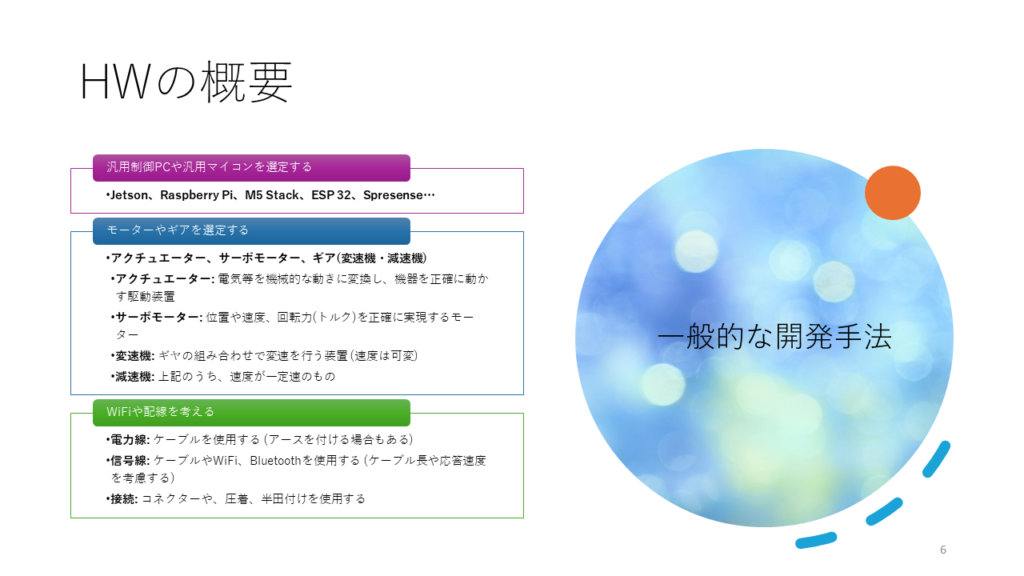
一般的な開発方法
- 汎用制御PCや汎用マイコンを選定する
- Jetson、Raspberry Pi、M5 Stack、ESP 32、Spresense…
- モーターやギアを選定する
- アクチュエーター、サーボモーター、ギア(変速機・減速機)
- アクチュエーター: 電気等を機械的な動きに変換し、機器を正確に動かす駆動装置
- サーボモーター: 位置や速度、回転力(トルク)を正確に実現するモーター
- 変速機: ギヤの組み合わせで変速を行う装置 (速度は可変)
- 減速機: 上記のうち、速度が一定速のもの
- アクチュエーター、サーボモーター、ギア(変速機・減速機)
- WiFiや配線を考える
- 電力線: ケーブルを使用する (アースを付ける場合もある)
- 信号線: ケーブルやWiFi、Bluetoothを使用する (ケーブル長や応答速度を考慮する)
- 接続: コネクターや、圧着、半田付けを使用する
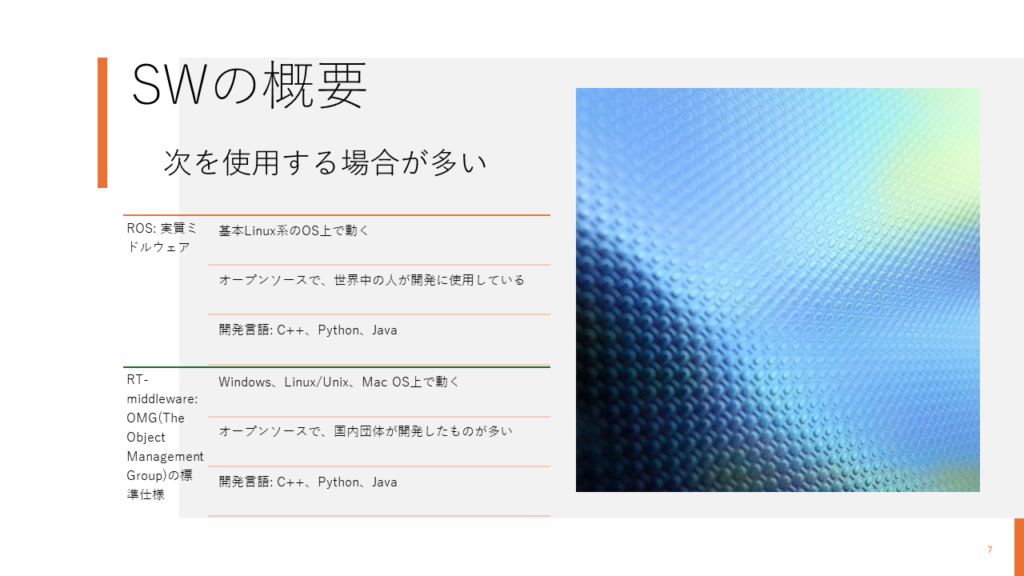
SWの概要
- ROS: 実質ミドルウェア
- 基本Linux系のOS上で動く
- オープンソースで、世界中の人が開発に使用している
- 開発言語: C++、Python、Java
- RT-middleware: OMG(The Object Management Group)の標準仕様
- Windows、Linux/Unix、Mac OS上で動く
- オープンソースで、国内団体が開発したものが多い
- 開発言語: C++、Python、Java
2. 開発手順
ROSを用いた方法
(対応機器導入、HW開発、SW開発)
OpenRTM-aistを用いた方法
(対応機器導入、HW開発、SW開発)

ROSを用いた方法
- 対応機器を導入する
- 購入する (かなり手っ取り早いが高価格になる)
- 自分で機器を作り対応させる (一気に高難易度化する)
- Linuxをインストールする
- Linux上にROSをインストールする
- ROSにパッケージを入れる
- プログラムを作る等し、コマンドで動かす
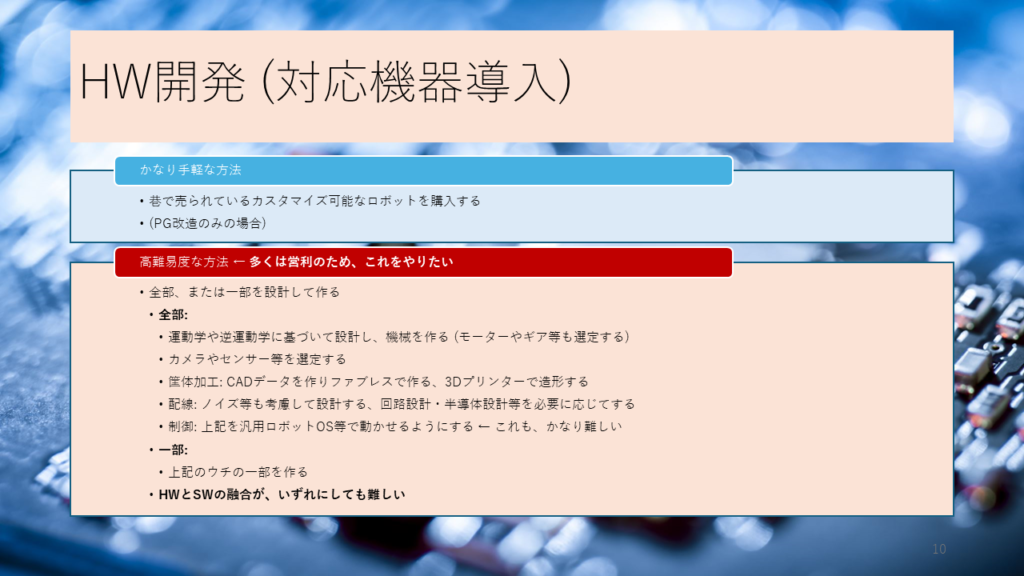
- HW開発 (対応機器導入)
- かなり手軽な方法
- 巷で売られているカスタマイズ可能なロボットを購入する
- (PG改造のみの場合)
- 高難易度な方法 ← 多くは営利のため、これをやりたい
- 全部、または一部を設計して作る
- 全部:
- 運動学や逆運動学に基づいて設計し、機械を作る (モーターやギア等も選定する)
- カメラやセンサー等を選定する
- 筐体加工: CADデータを作りファブレスで作る、3Dプリンターで造形する
- 配線: ノイズ等も考慮して設計する、回路設計・半導体設計等を必要に応じてする
- 制御: 上記を汎用ロボットOS等で動かせるようにする ← これも、かなり難しい
- 一部:
- 上記のウチの一部を作る
- HWとSWの融合が、いずれにしても難しい
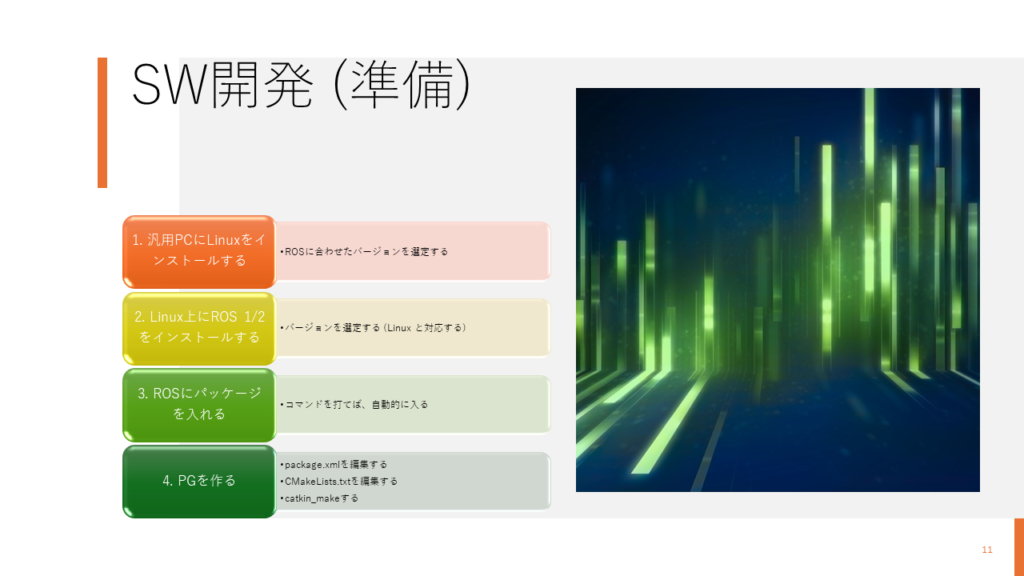
SW開発 (準備)
1. 汎用PCにLinuxをインストールする
- ROSに合わせたバージョンを選定する
2. Linux上にROS 1/2をインストールする
- バージョンを選定する (Linux と対応する)
3. ROSにパッケージを入れる
- コマンドを打てば、自動的に入る
4. PGを作る
- package.xmlを編集する
- CMakeLists.txtを編集する
- catkin_makeする

OpenRTM-aistを用いた方法
- 対応機器を導入する
- 購入する (かなり手っ取り早いが高価格になる)
- 自分で機器を作り対応させる (一気に高難易度化する)
- Win、Linux等で動作する
- Python等をインストールする
- GUIインストーラーでインストールする
- GUIでノードを繋いで実行する (パラメーター変更やPG動作も可能)
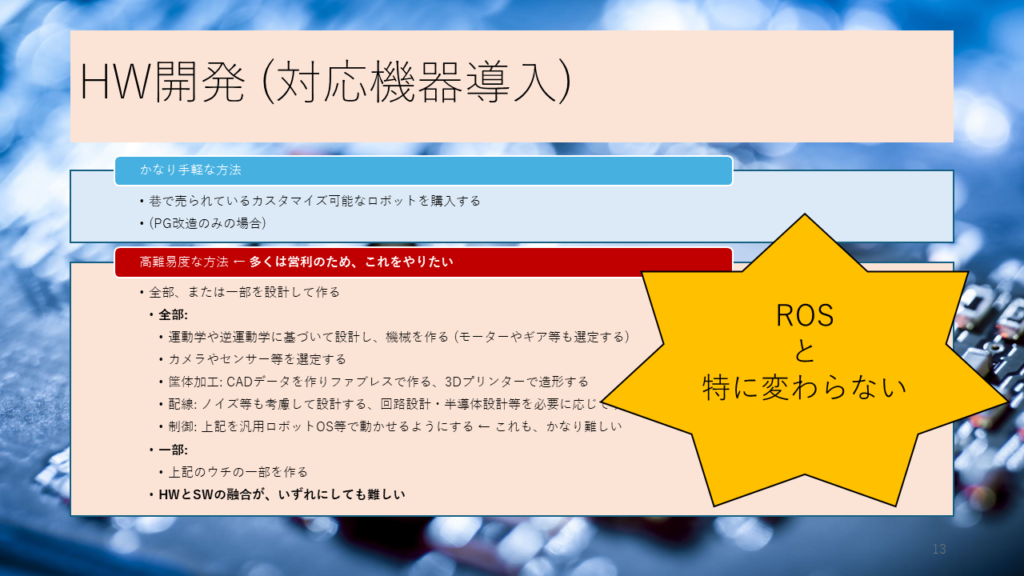
ROSと特に変わらない
- HW開発 (対応機器導入)
- かなり手軽な方法
- 巷で売られているカスタマイズ可能なロボットを購入する
- (PG改造のみの場合)
- 高難易度な方法 ← 多くは営利のため、これをやりたい
- 全部、または一部を設計して作る
- 全部:
- 運動学や逆運動学に基づいて設計し、機械を作る (モーターやギア等も選定する)
- カメラやセンサー等を選定する
- 筐体加工: CADデータを作りファブレスで作る、3Dプリンターで造形する
- 配線: ノイズ等も考慮して設計する、回路設計・半導体設計等を必要に応じてする
- 制御: 上記を汎用ロボットOS等で動かせるようにする ← これも、かなり難しい
- 一部:
- 上記のウチの一部を作る
- HWとSWの融合が、いずれにしても難しい

SW開発 (準備)
1. Pythonをインストールする
- バージョンを合わせる
2. OpenRTM-aistを導入する
- ダウンロードし、インストールする
3. VCVerChangerを実行する
- レジストリーを整えるためである
4. RTSystemEditorを使用する
- ノードとノードを接続し、適宜パラメーターを入力する
2024/6/24
ロボットやAIが、自身を作成生成するようになったとしたら、どうなるのでしょうか?
私の予想ですと、人類に残された仕事は、多くが、ロボットやAIに置き換わる中で、
人類という種(しゅ)を絶滅しないようにするとか、人類をサイボーグ化するとかしか無くなる気がしています。
ロボットやAIが、悪用されなければ、よいです。
よい方向にも、そうでない方向にも、絶対値が人間に考えられない位に、大きすぎになるでしょうから。
創薬とかに適切に使われた場合、驚異的なスピードで、もしかすると、不老長寿の薬ができるかもしれません。
ゲノム解読とか、かもしれません。
宇宙の謎が解けるかは、分からないですが。
ただ、結局、高度な倫理観が必要になってくる気がしていて、仮に(大規模な)事故等が起きた場合は、
開発に関連した、法整備がされたり許認可制となっていくような気もしています。
その策定 等は、困難でしょうし、そういったモノを作るのにも、ロボットやAIが使われるのかもしれません。
後、世の中的に、よいロボットやAIと、よくないロボットやAIが、混在していくような気もしています。
もしかすると、よくない学習をしたり、バグ等で壊れて異常な行動を取るモノも出てくるかもしれません。
これからの世の中、技術革新が加速化して不確実性 等があると考えますし、
許認可制であっても、そうでなくても、法整備がどうであろうと、
できるたけ、よいモノを、割合としても、できるだけ沢山作る位しか、社会にとって、よい手は無いといったような気がしています。
2024/7/2
ロボット開発において、作るための情報が、割合として圧倒的に多い訳です。
しかし、セキュリティーや安全な運用 等、それ以外の情報が、ほとんど公開ネット上に無いと思います。
その話から、原発とかと同じで、作るだけ作っておいて、後で、どうなる/どうする のか、分からない、みたいな状況になるのではないか?と思ってしまいました…
今後、そういったことも含めて、世界中で議論が活発化することを期待します。
次の動画は、ROS上で、次を実施したものです。
“roscore” を起動
“rosrun beginner_tutorials talker”を実行
“rosrun beginner_tutorials listener”を実行
これにより、Pub-Sub 通信をしています。
ROS を使う人には、かなり基本的なモノだと思いますが。
@tiktok_tokyo_jp Motion of ROS Basic Program, Publisher (Talker) and Subscriber (Listener). 1. "roscore" 2. "rosrun begineer_tutorials talker" 3. "rosrun begineer_tutorials listener" ROS の基本的なプログラムである、Pusbisher (Talker)とSubscriber (Listener)の動作結果です。
♬ オリジナル楽曲 - tiktok_tokyo_jp
2024/7/4
ROS でturtlesim を動かす様子を動画にしました。
“roscore” を起動
“rosrun turtlesim turtlesim_node”を実行
“rosrun teleop_twist_keyboard teleop_twist_keyboard.py cmd_vel:=/turtle1/cmd_vel _speed:=2.0 _turn:=2.0″を実行
teleoo_twist_keyboard がインストールされていない場合は、次を実行するとよいです。
@tiktok_tokyo_jp Movie of moving turtlesim on ROS. ROS でturtlesim を動かす様子です。
♬ うさぎとかめ - ひばり児童合唱団/藤家虹二クインテット+α
2024/7/22
2024/6/21 の資料の続きです。
3 の実例からです。

- ROSを用いた方法
- OpenRTM-aist を用いた方法
- ROSを用いた方法
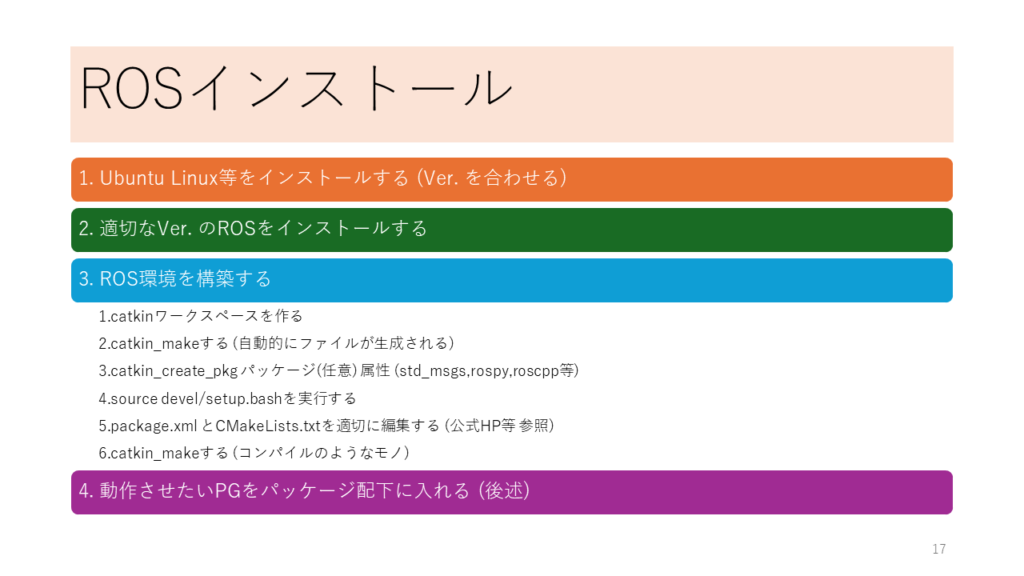
- 1. Ubuntu Linux等をインストールする (Ver. を合わせる)
- 2. 適切なVer. のROSをインストールする
- 3. ROS環境を構築する
1.catkinワークスペースを作る
2.catkin_makeする (自動的にファイルが生成される)
3.catkin_create_pkg パッケージ(任意) 属性 (std_msgs,rospy,roscpp等)
4.source devel/setup.bashを実行する
5.package.xml とCMakeLists.txtを適切に編集する (公式HP等 参照)
6.catkin_makeする (コンパイルのようなモノ)
- 4. 動作させたいPGをパッケージ配下に入れる (後述)
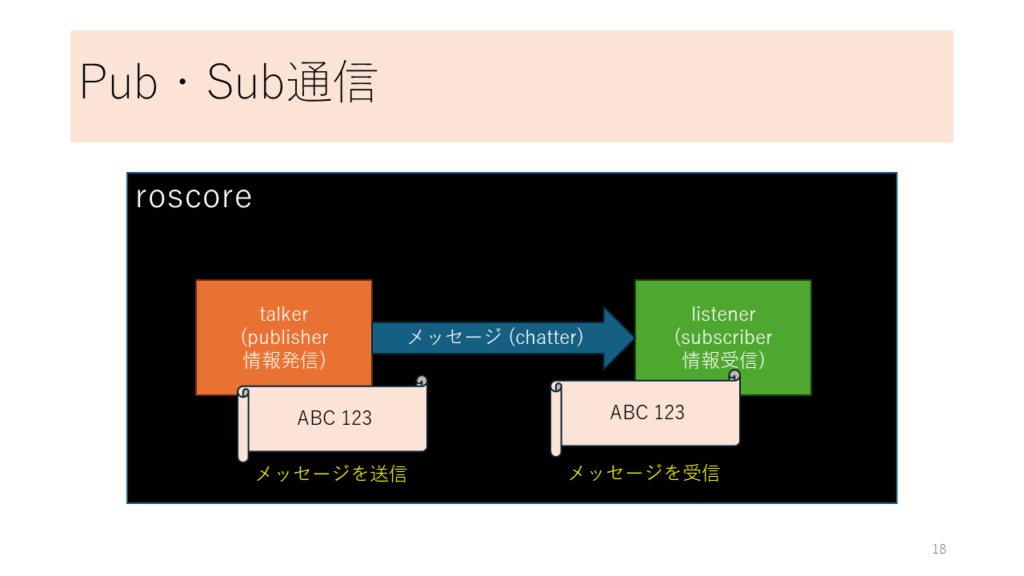
Pub・Sub 通信の様子は、上図の通りである。
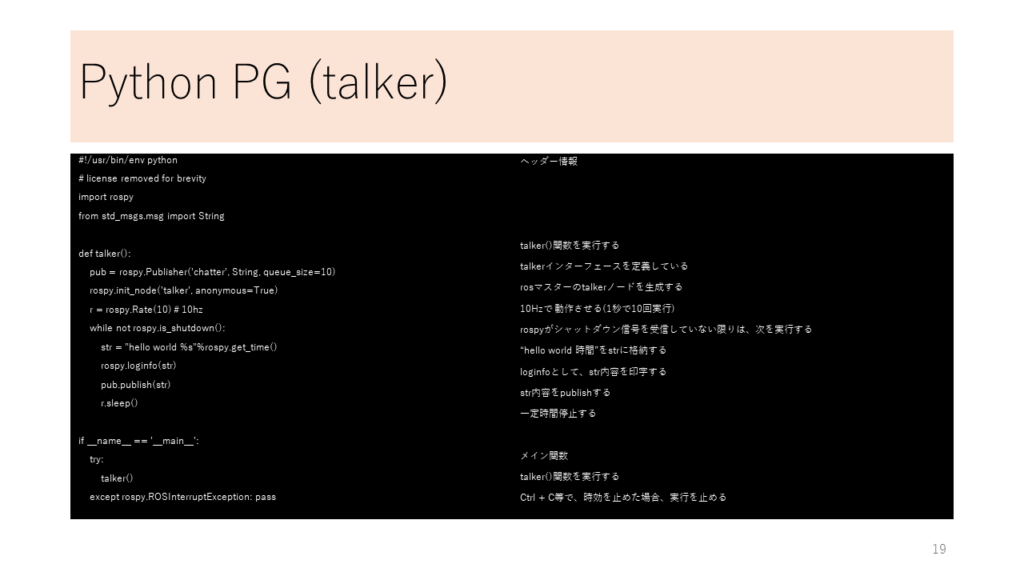
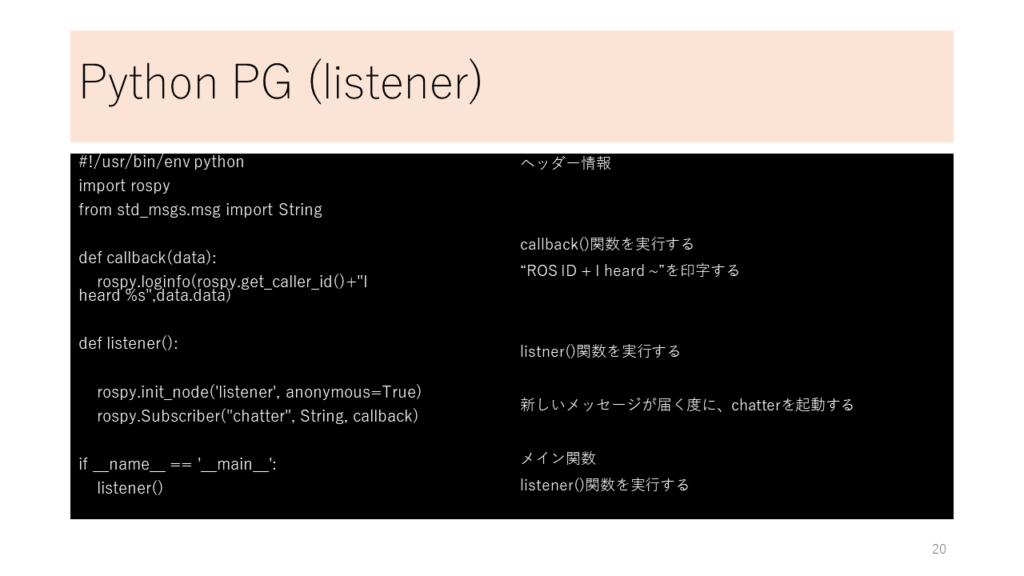
プログラムは、上図の通りである。 (ROS 公式ホームページを参照)
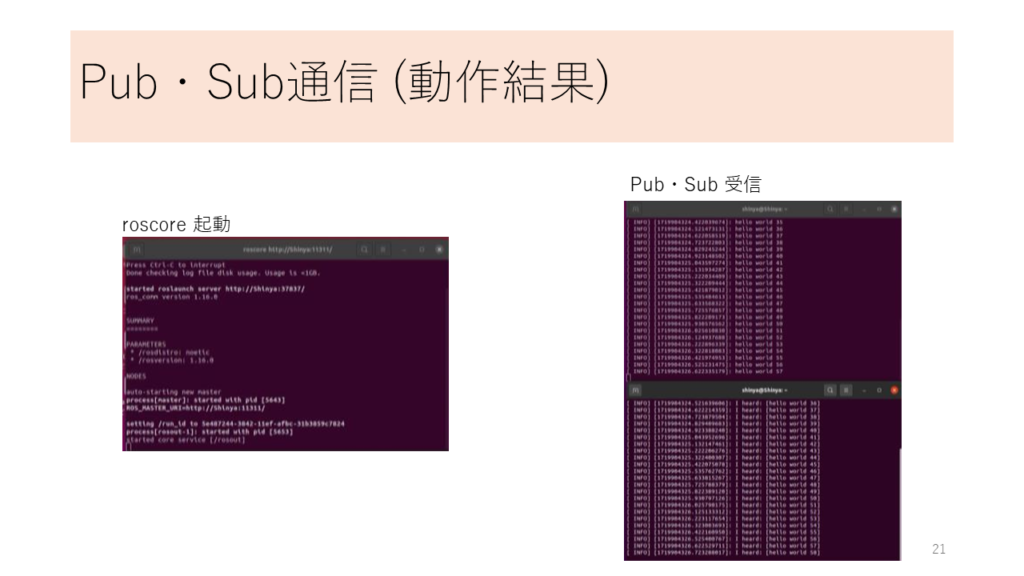
動作結果は、上図の通りである。 (動画参照<2024/7/2の投稿にもある>)
Pub・Sub通信でできること (ROS)
- 値をデバイス間で転送することができる
- カメラやセンサーの値を転送することができる
- PGやCUIで、ロボットを制御できる
2. OpenRTM-aist を用いた方法
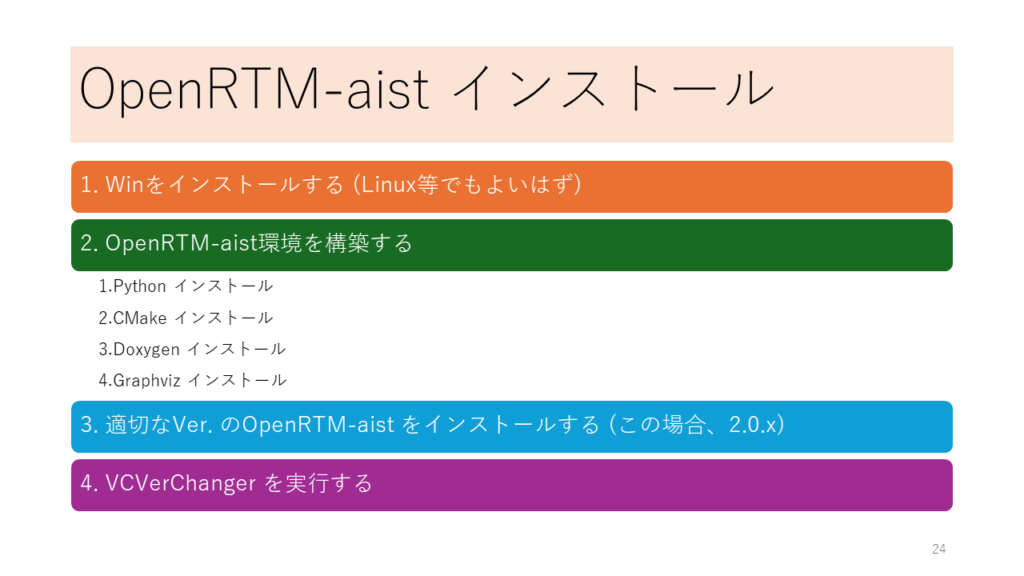
OpenRTM-aist 2.0 インストール
- 1. Winをインストールする (Linux等でもよいはず)
- 2. OpenRTM-aist環境を構築する
1.Python インストール
2.CMake インストール
3.Doxygen インストール
4.Graphviz インストール
- 3. 適切なVer. のOpenRTM-aist をインストールする (この場合、2.0.x)
- 4. VCVerChanger を実行する
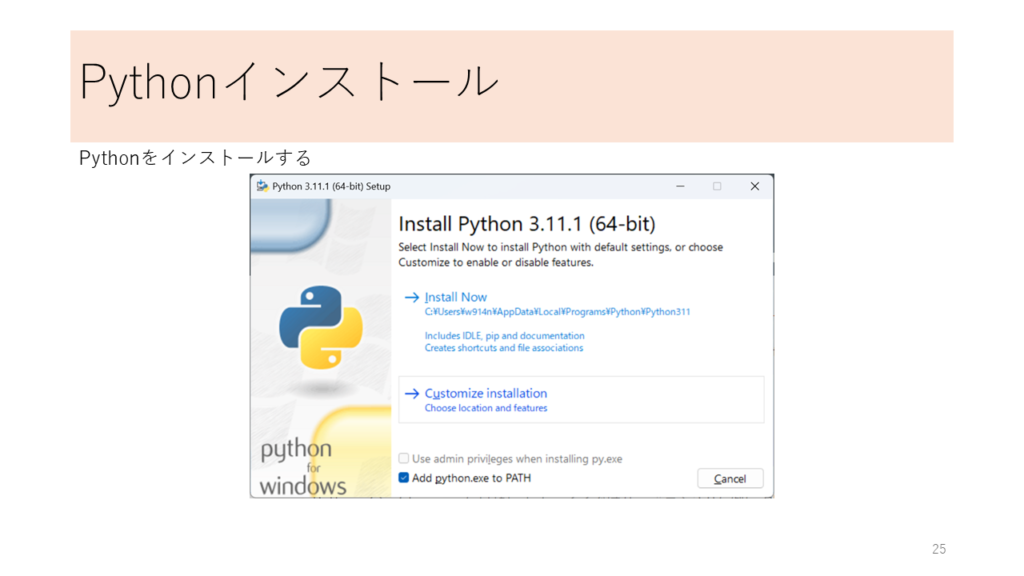
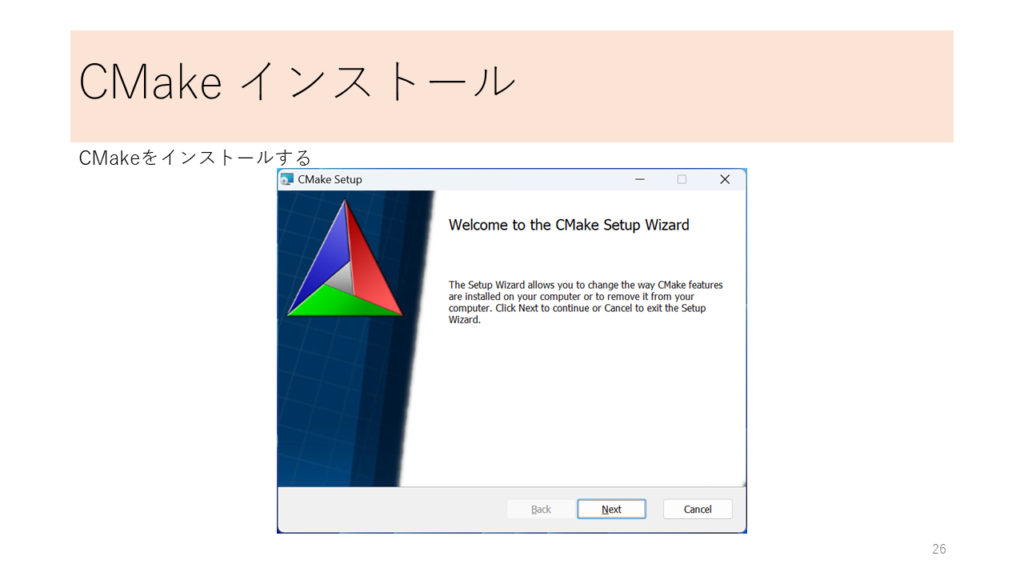
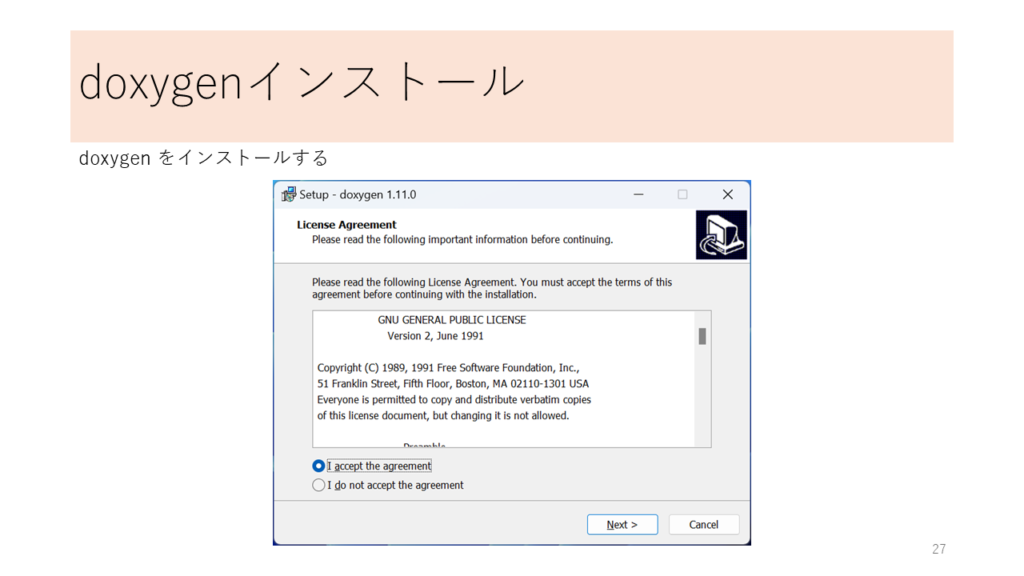
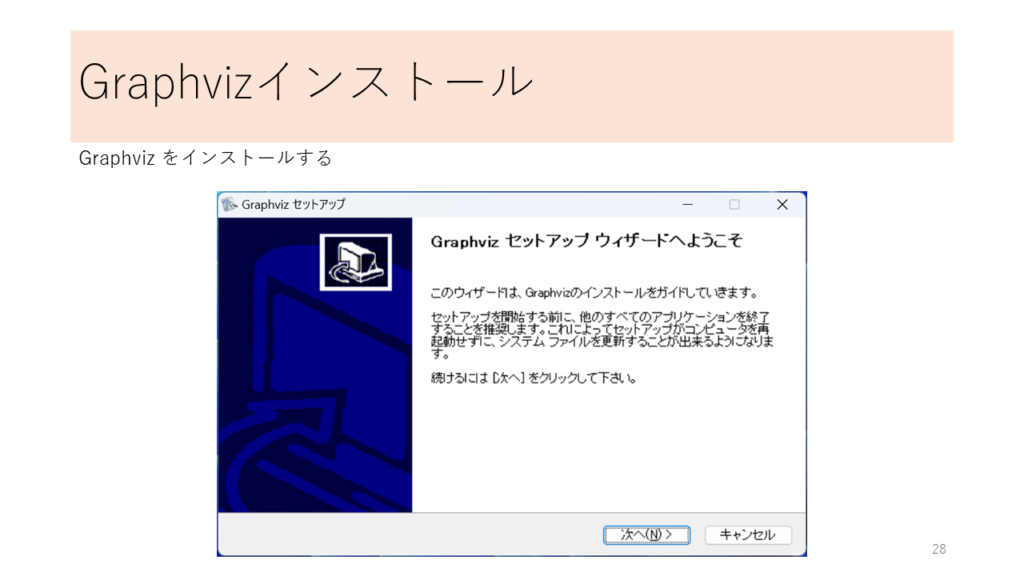
Python とCMake、doxygen、Graphviz を、ダウンロードしてインストールする。

OpenRTM-aist-2.0.2 のインストール
OpenRTM-aistをダウンロードし、インストーラーの指示に従いインストールする
※ WinがPCを保護する画面が出た場合でも実行する
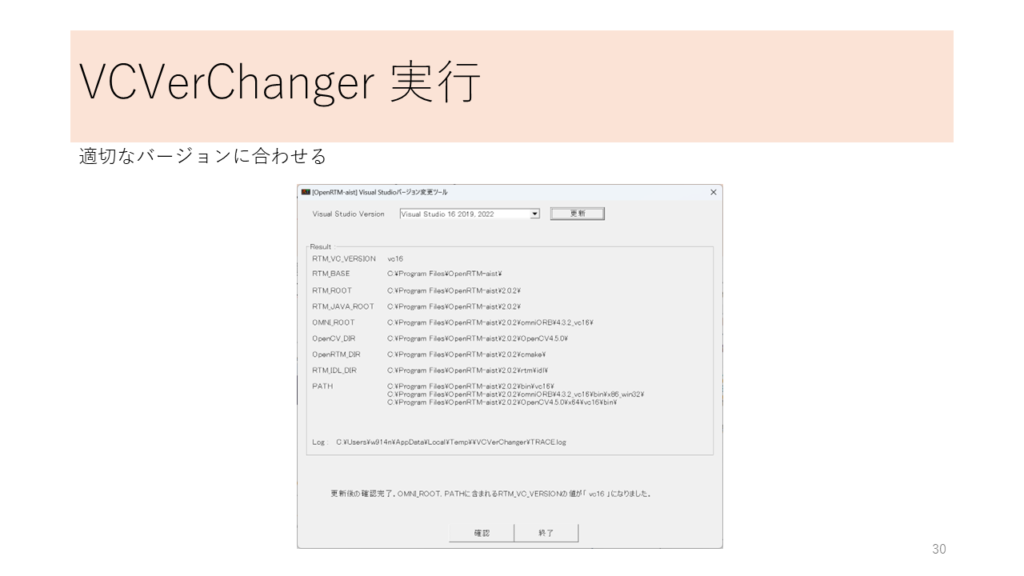
VCVerChanger を実行する。
適切なバージョンに合わせる。 (この場合、Visual Studio 16 2019, 2022)
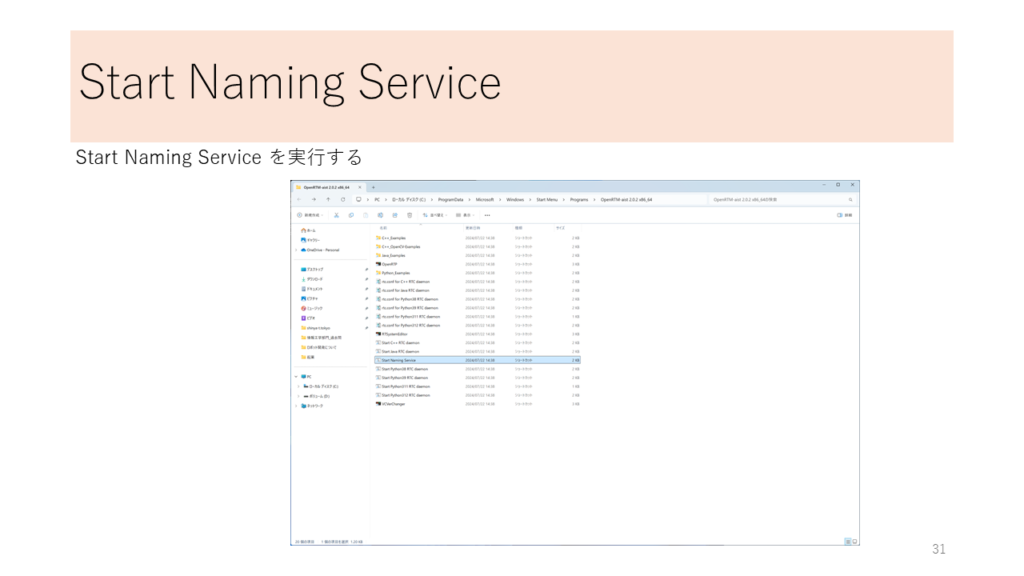
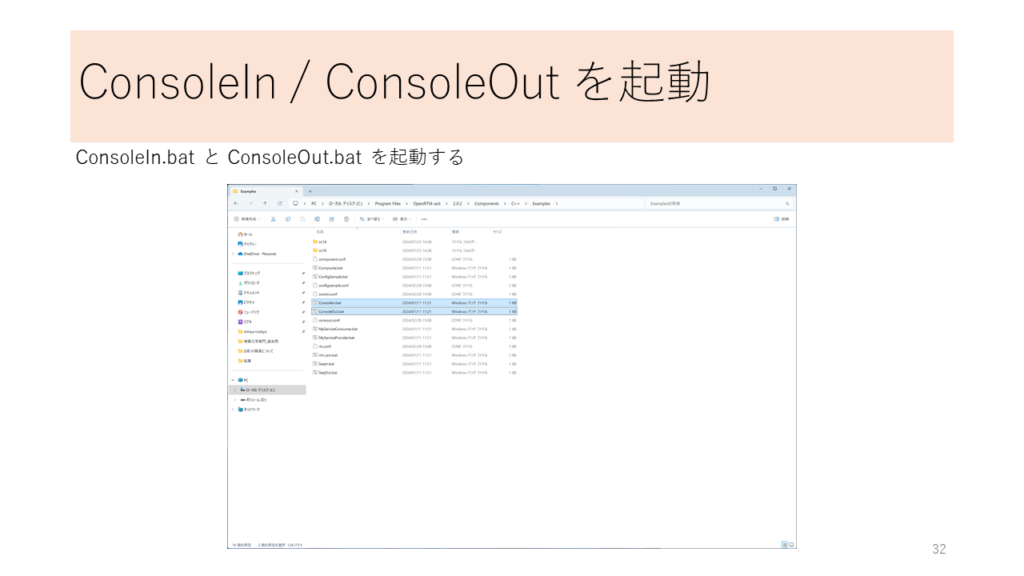
Start Naming Service を実行し、 ConsoleIn.bat と ConsoleOut.bat を起動する
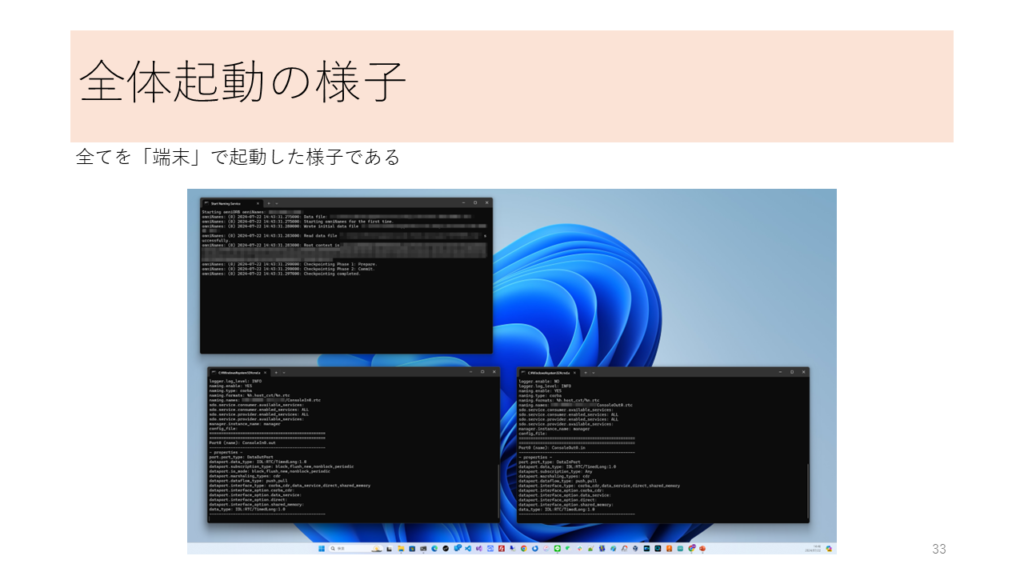
全体起動の様子は、上図の通りである。
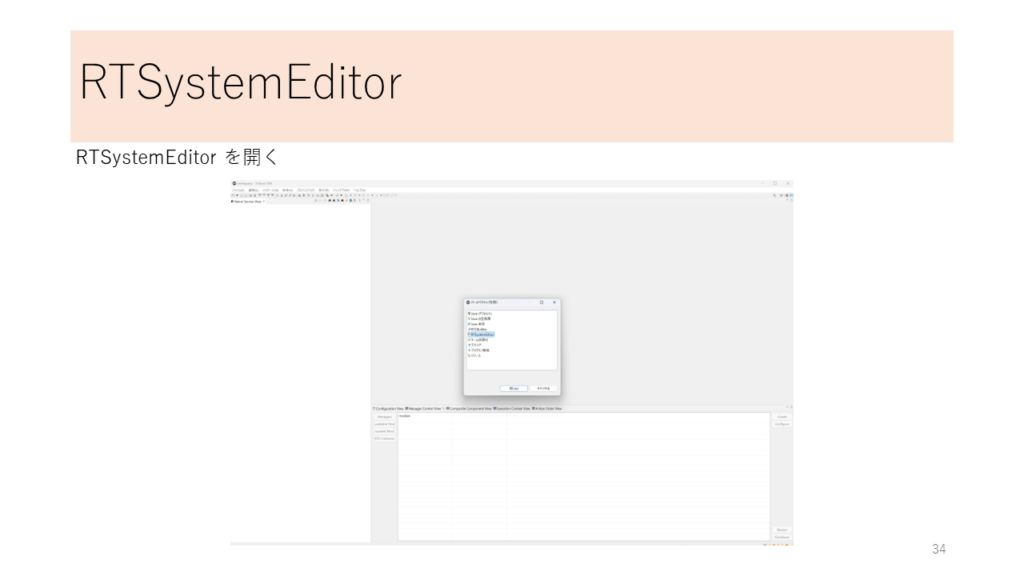
RTSystemEditor を開き、
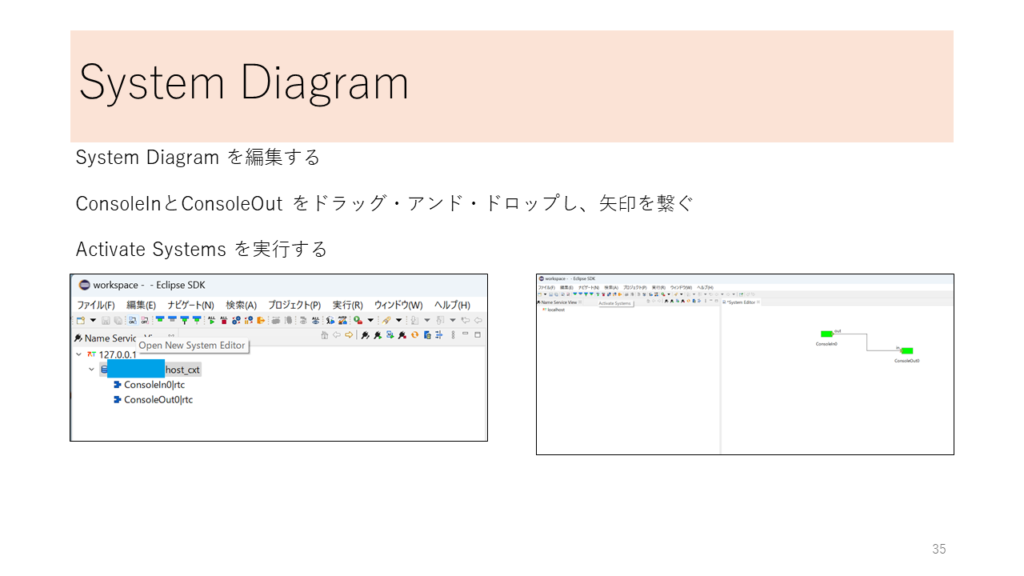
System Diagram を編集する。
ConsoleInとConsoleOut をドラッグ・アンド・ドロップし、矢印を繋ぎ、
Activate Systems を実行する。
OpenRTM-aist 2.0.2 のノード通信の様子は次である。
(YouTube 、TikTok、画像)
@tiktok_tokyo_jp OpenRTM-aist 2.0 Node Communication result. OpenRTM-aist 2.0 ノード通信の結果です。
♬ オリジナル楽曲 - tiktok_tokyo_jp
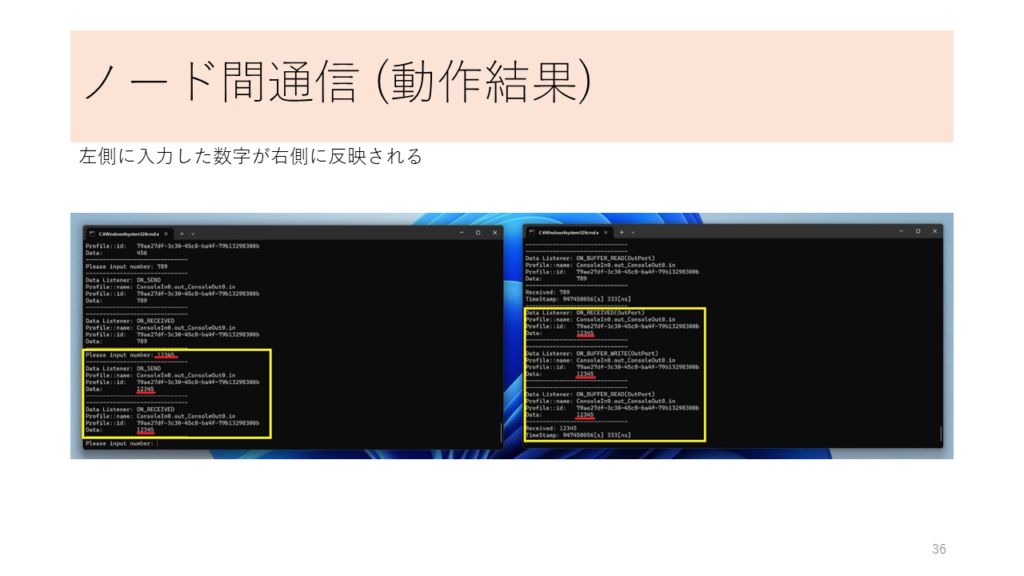
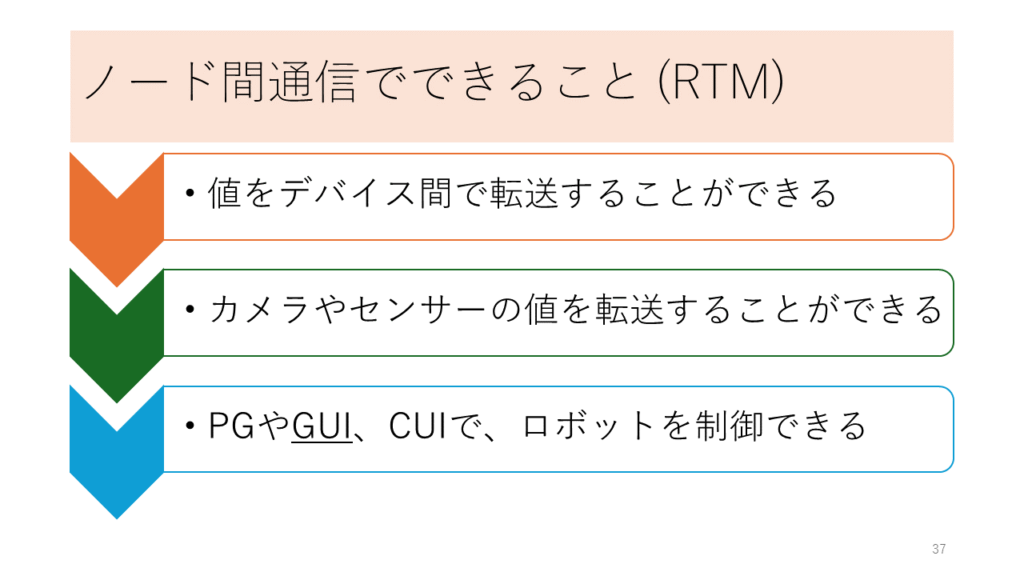
ノード間通信でできること (RTM)
- 値をデバイス間で転送することができる
- カメラやセンサーの値を転送することができる
- PGやGUI、CUIで、ロボットを制御できる
GUI で制御できるのが、ROS との違いである。
ご清聴ありがとうございました。
2024/9/26
背景としては、PC を全くの更地?(ユーザーファイル等 含む)にする際に、
いっその事、Linux とのデュアルブート化を施して、Linux + ROS2 + Autoware 環境を実現しよう、とか思いました。
(HW 的な性能は足りていると「現在」思っています)
以前は、Autoware がHW 的にGUI起動はしませんでしたが。 (VirtualBox上ではNVIDIAのCUDA直起動ができないからと思っています)
ちなみに、Autoware は「趣味」であって、今のところ業務では、ないです。
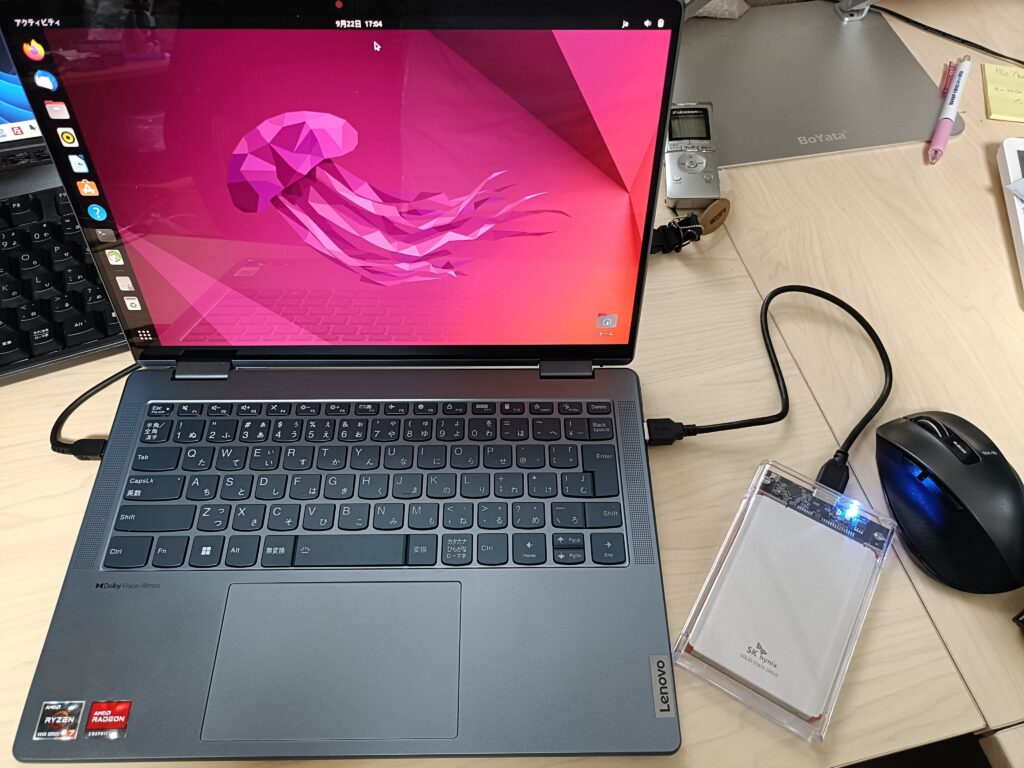
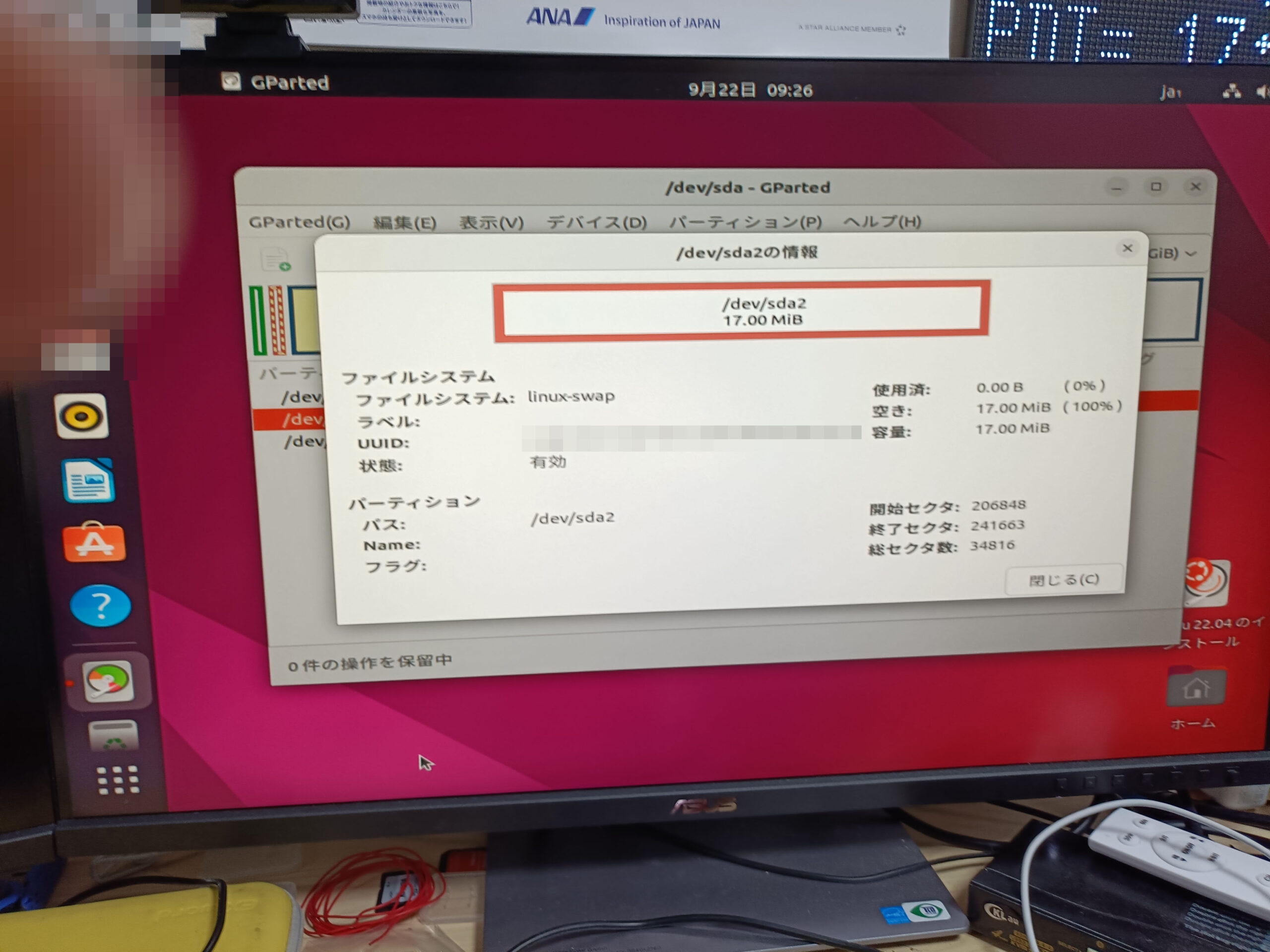
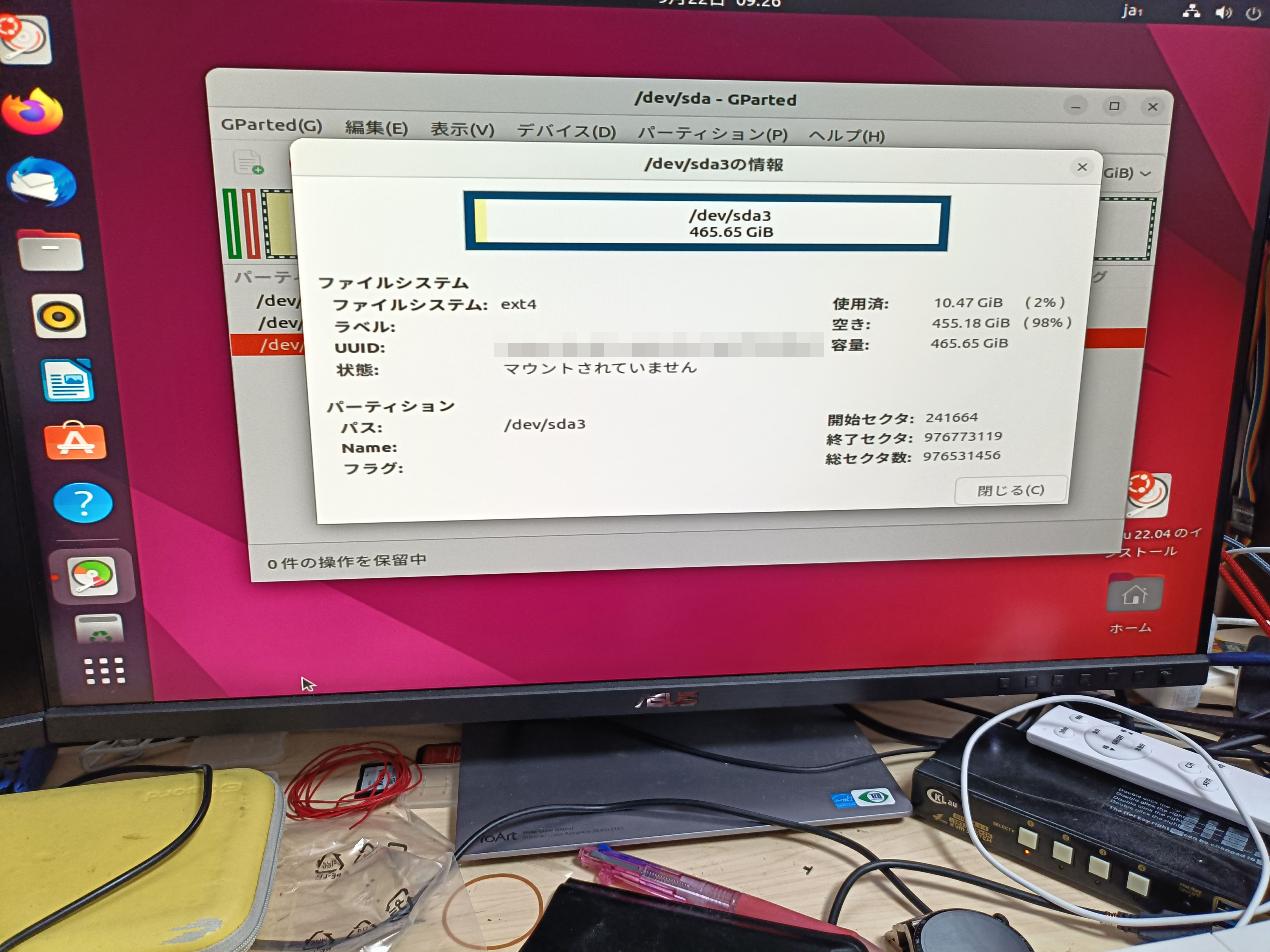
外部SSD でUbuntu Linuxが起動するように、ガチャガチャやっていました。
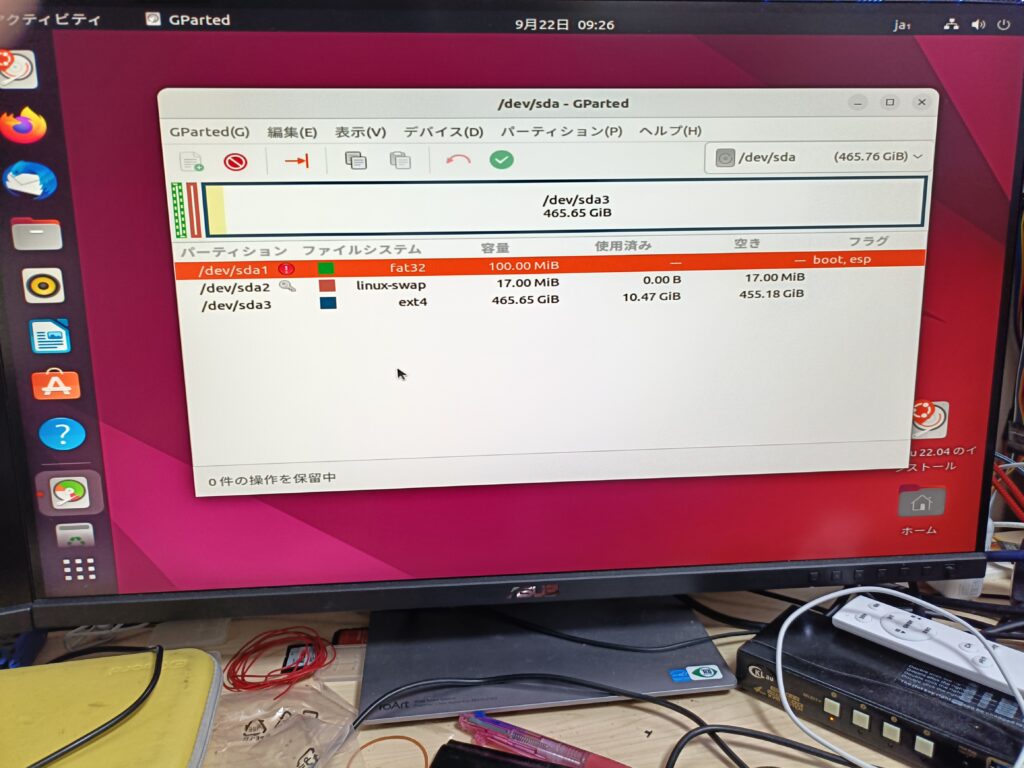
まず、パーティションで、マウントポイントを指定するところに”/”を入れ忘れているという事に気が付くのに、時間を消費しました。
更に、/cdrom がアンマウントされないといった事が表示されていたので、UEFI設定で、SATAをAHCIからRAIDに変更しましたが、変わりませんでした。
滅茶苦茶、困った訳ですが、インストールを途中で中断すると、更地のUbuntuが使えるので、そこで「端末」を開いて、”umount /cdrom”と入れました。
しかし、まだアンマウントされないと出ていたので、確か”umount -a -t /cdrom”と入れたところ、ビジー状態でアンマウントできないと出ました。
よって、”umount -l /cdrom”とコマンドを叩いたところ、アンマウント「は」できました。
しかし、それまでの設定上、バグったのかどうか知らないですが、エラー画面が出て、先に進めないという状況です。
よって、AHCIに戻して、DVD/CD-ROMをDisabledに変更して実施すると、どうなるのか、試そうとしましたが、それが原因では、ありませんでした。
SATA → RAID → “umount -l /cdrom” or “umount -a -t /cdrom”が正解なのかとか、
SATA → AHCI → DVD → Disabled → “umount -l /cdrom” or “umount -a -t /cdrom”で上手く行くとも思っていましたが…
(実際にアンマウントできたモノの、やはり、先に進めなかったです)
今更、Linuxのインストール時でも”Ctrl + Alt + T”を押すことで「端末(ターミナル)」が開くという事が分かりました。
ここには、インストールには、SSD「と」USBメモリーが必要とあります。
参考にしたのは、次のサイトです。
https://zenn.dev/karaage0703/articles/0ca67e19aa772e
https://zenn.dev/karaage0703/articles/d38e17bd6efbaa
https://magidropack.hatenablog.com/entry/2018/11/04/011715#chapter01
https://atmarkit.itmedia.co.jp/ait/articles/1802/16/news025.html
https://forums.ubuntulinux.jp/viewtopic.php?id=5876
https://www.itechguides.com/no-root-file-system-is-defined/
https://forums.ubuntulinux.jp/viewtopic.php?id=5876
https://qiita.com/karaage0703/items/e79a8ad2f57abc6872aa
私は、SSDのみで実施したので、それで失敗しているのかもしれないと思いました。
ただ、色々と設定しても、できないことが分かったので、ブートローダーを消す事にしました。参考にしたのは次です。
【Ubuntu】【上級者向け】Grubブートローダを削除する
https://qiita.com/arkoudha/items/98136ddf1432e904d215
【Ubuntu】【上級者向け】Grubブートローダをインストールする
Ubuntuが起動しないエラーが起きたので、次を参考に直しました。
・ Ubuntuインストール時にエラーが出た
https://askubuntu.com/questions/1425691/ubuntu-freezes-on-first-start-after-installation
・ 最初の起動でUbuntuがフリーズした
https://askubuntu.com/questions/858082/i-o-error-during-ubuntu-installation
・ 次を入れたら直った
https://docs.nvidia.com/datacenter/tesla/tesla-release-notes-515-65-07/index.html
次をやろうと思いました。
https://bbs.archlinux.org/viewtopic.php?id=279602
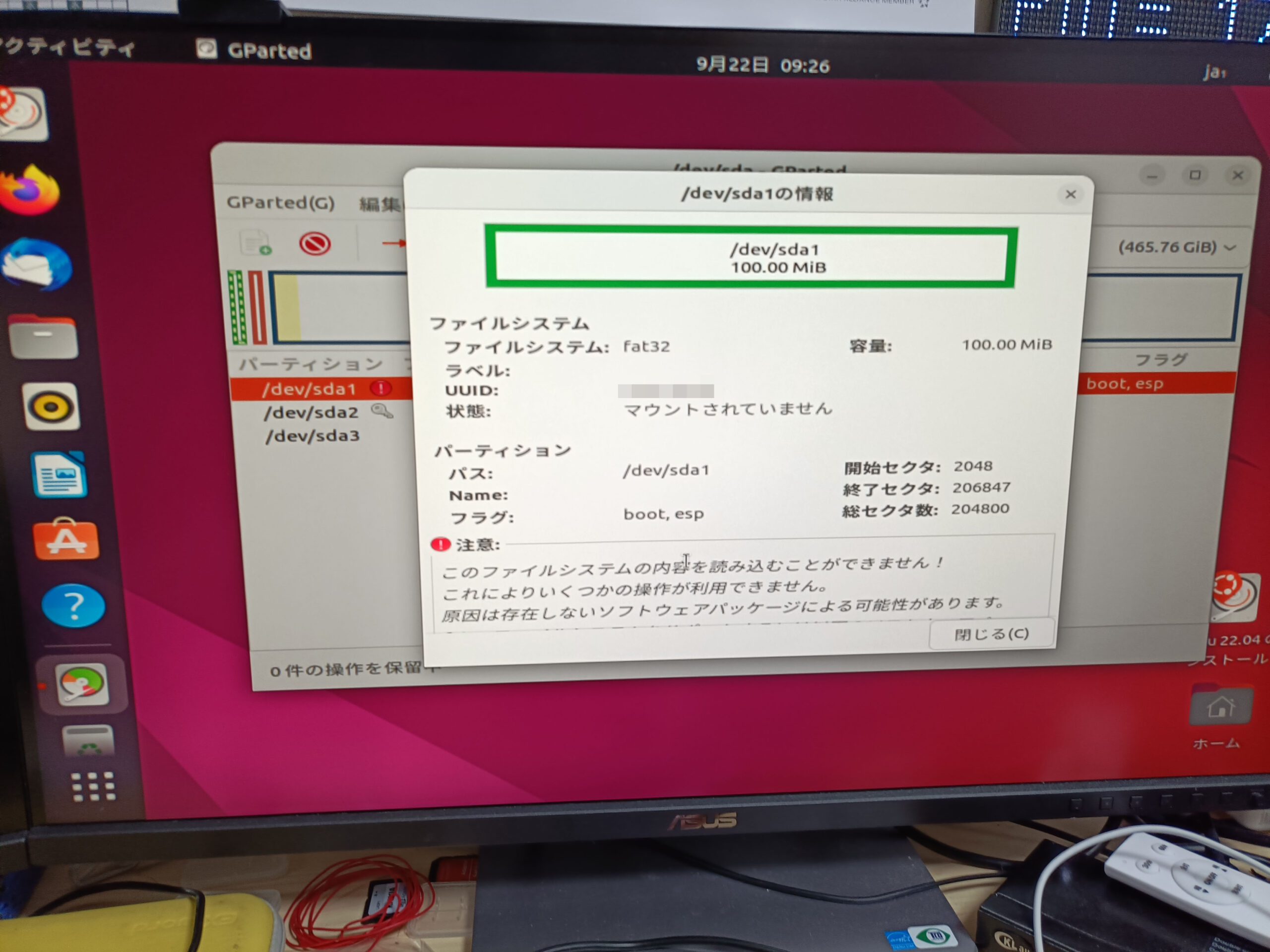
結局は、”/dev/sda1″が”/mnt/boot/efi”にマウントされていたので、
単純な”/boot/efi”「か」”./”にマウントしました。 (詳しくは覚えていないです)
本当は、SSD内にブートローダーを入れて、SSDを繋いだ場合にWinやLinuxが選べるようにしたかったですが、それは、諦めました。
(起動時に、起動デバイスをUEFIで指定したら、よいからです)
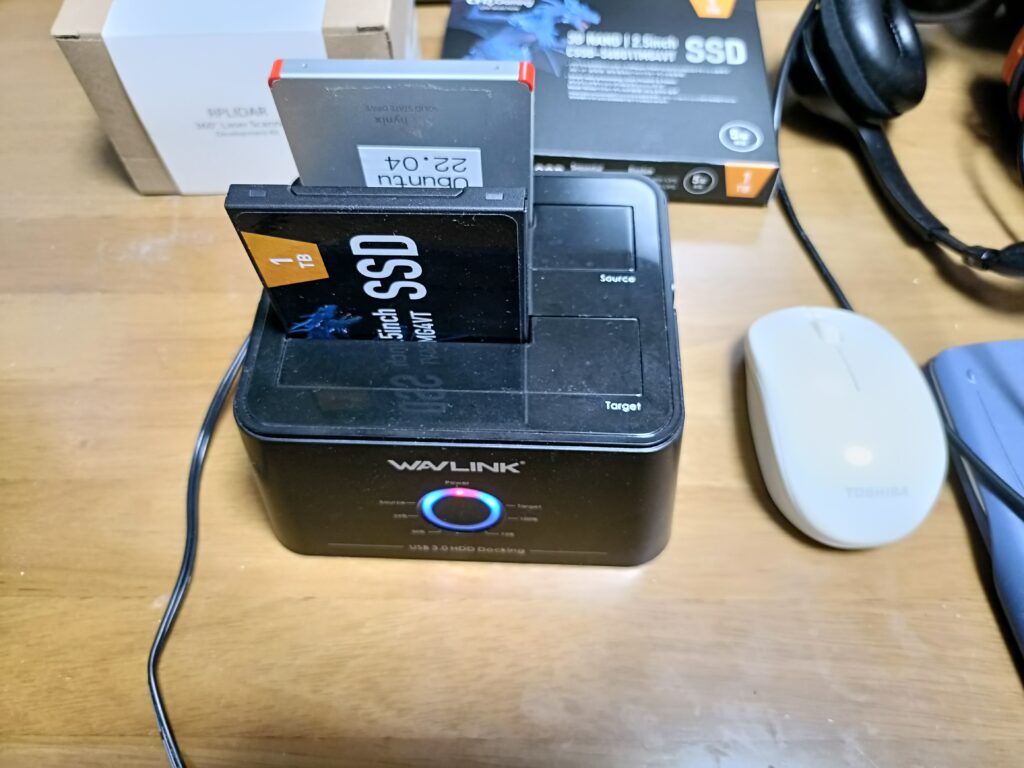

上図のようにクローニングしました。
ソースとターゲットを間違えると、悲惨ですが。
2024/11/4
「個人環境としては」かなり久しぶりにVSCodeでの、CとPython環境を構築しました。PCを一からキッティングしたためです。
ここで”MinGW”を使ったコンパイルでなく”Code Runner”みたいなモノを使う方が、構築が楽で、
エラーみたいなモノも出ないで、
コンパイル実行できるみたいな事を思い出しました。
それだと不味いのかどうかは、不明です。
参照:
WindowsへのC言語・C++用コンパイラ導入方法【MinGW】
2024/11/4
#include <Arduino.h> が、できない問題が発生していましたが、
WorkSpaceフォルダーを新しくしてから、また、同じ内容をコピペしたら直りました。 (.vscodeフォルダーを消すだけだと、ダメでした)
参照: https://community.platformio.org/t/cannot-open-source-file-arduino-h/8044/21?page=2
2024/11/9
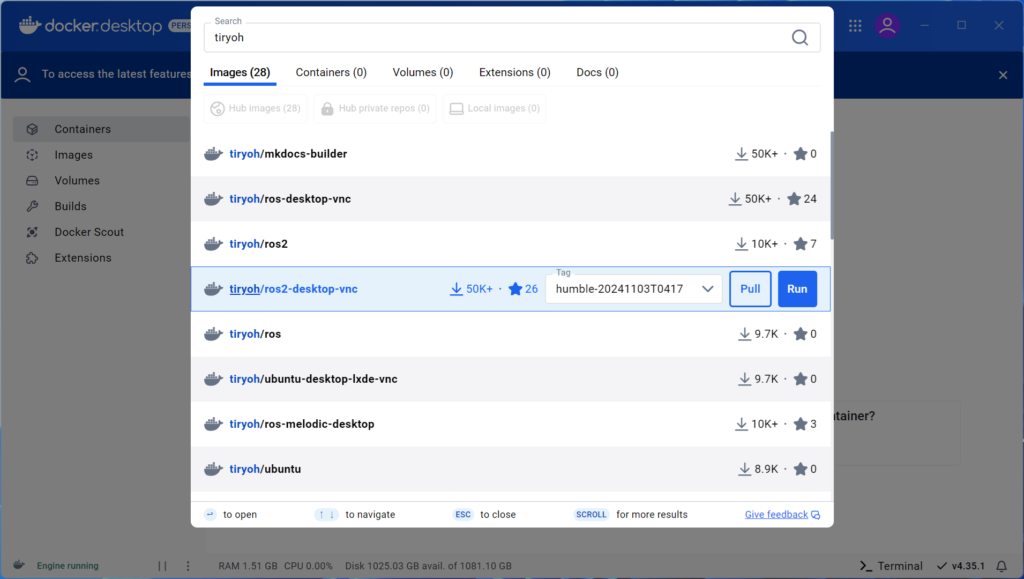
「Docker使用で」ROS 2環境を整備しました。
(更地から、Docker等 不使用で、直でデバイスにインストールしたとしたら、ずっと時間がかかると思います)
docker desktopをインストールして、次のようにするとよいです。
インストール中に、メアドを入れる事を促されますが、別にSkipしても、よいと現在思っています。
(機能が削られる位らしいです。何の機能かは、知らないですが)
参照: https://github.com/Tiryoh/docker-ros2-desktop-vnc
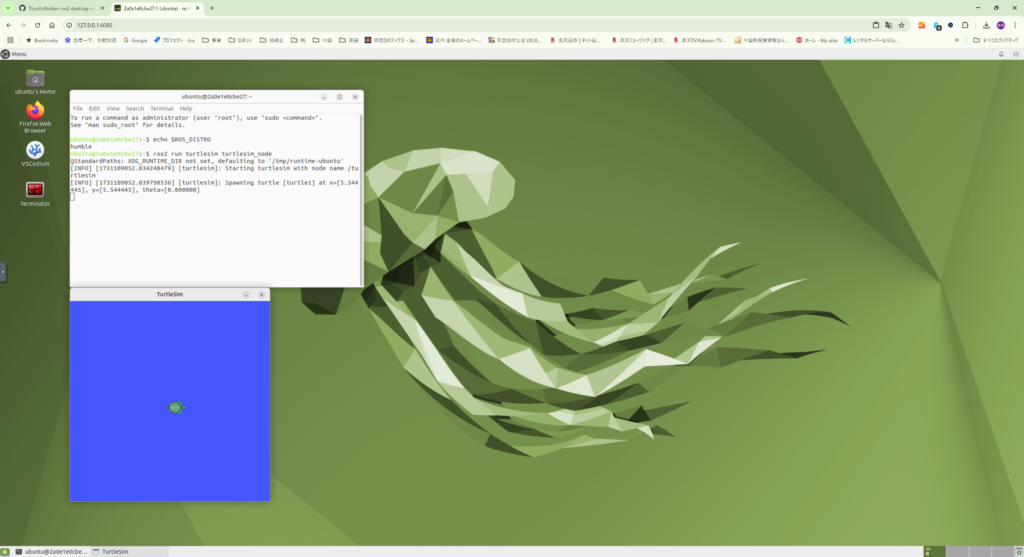
turtlesim を動かしました。
2024/11/15

ROS 2とかで一定の試行をしています。
上図は、turtlesimとVSCode連携を試したものです。
@tiktok_tokyo_jp Realized ROS 2 Publisher & Subscriber Communication. ROS2でPublisherとSubscriberの通信を実現しました。 #ROS2
♬ オリジナル楽曲 - tiktok_tokyo_jp
上記動画は、実際にROS 2でturtlesimを動かしたモノです。
2024/11/15

ROS 2とUnityを連携させるために、図のように、Unityをダウンロードして、インストールし、起動しました。
(メールアドレスを登録する必要があると思います)
ハッキリ言って、それらが、Ryzen 9でRAM 128 GBのPCでさえも、処理時間がかかりました。
2024/11/15
自作PCが起動していなかったので、これを試したら直りました。嘘みたいだと思ったら、本当でした。
『Q-LED(ブートランプ)が「DRAM」点灯時の原因追及』
『電源ケーブル半刺さり』
https://note.com/satoshi_oda/n/n79f993457b31#d7bebf8b-273a-47da-a358-e0be320ef39a
ついでに、UEFI起動前?に「キーボードが見つかりません」的な画面が表示される問題が発生していました。
それは何が原因なのかと思ったら、
「KVMスイッチ」
でした。
最初は、マザーボードの故障や、ケーブル不調を疑いましたが、
PCのUSBに、キーボードを直刺ししたところ、その画面表示は出ませんでしたから。


上が新しいKVMスイッチです。
下が古いKVMスイッチです。


なお、古いKVMスイッチは、どれ位かは分かりませんけど、
かなり使った感があります。
2025/1/4
2025/3に、ロボット開発についての講演をする予定となっているので、その資料作成をしています。
次は、ROS 2とUnity を連携させている動画です。
Win 11で、Virtual Box上のROS 2とUnity 6を作動連携させています。
Unityのデータをパブリッシュして、ROS 2でサブスクライブしました。
Published Unity data and Subscribed in ROS 2.
ROS 2のデータをパブリッシュして、Unityでサブスクライブしました。
Published ROS 2 data and Subscribed in Unity.
@tiktok_tokyo_jp Published Unity data and Subscribed in ROS 2. Unityのデータをパブリッシュして、ROS 2でサブスクライブしました。
♬ オリジナル楽曲 - tiktok_tokyo_jp
@tiktok_tokyo_jp Published ROS 2 data and Subscribed in Unity. ROS 2のデータをパブリッシュして、Unityでサブスクライブしました。
♬ オリジナル楽曲 - tiktok_tokyo_jp
2025/1/14
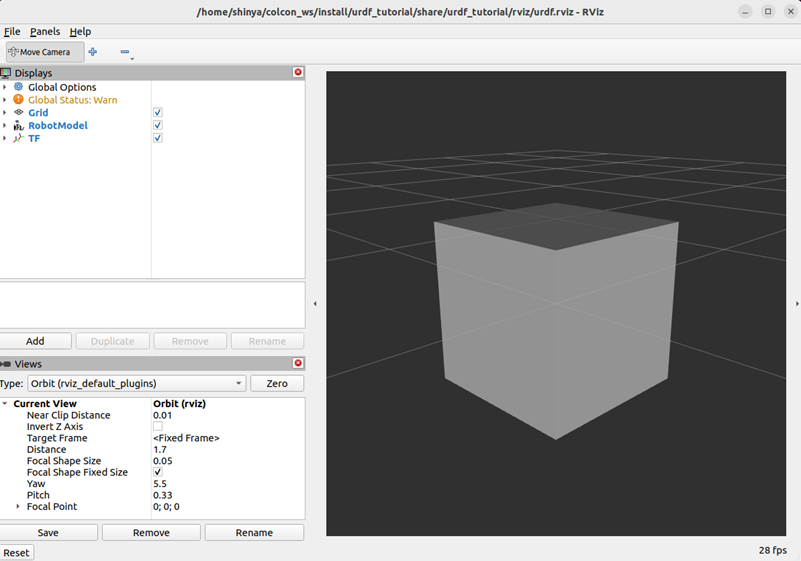
@tiktok_tokyo_jp URDFモデルを作って、Rviz2で動かしました。 立方体に円柱を付けて回転させる事ができます。 Moved URDF Model on Rviz2 on ROS 2. Cylinder on cube is able to rotate.
♬ オリジナル楽曲 - 武内 晋哉 (Shinya TAKEUCHI)
上の動画について、URDFモデルを作って、Rviz2で動かしました。 立方体に円柱を付けて回転させる事ができます。
About the movie above, I moved URDF Model with Rviz2 on ROS 2. Cylinder on cube is able to rotate.
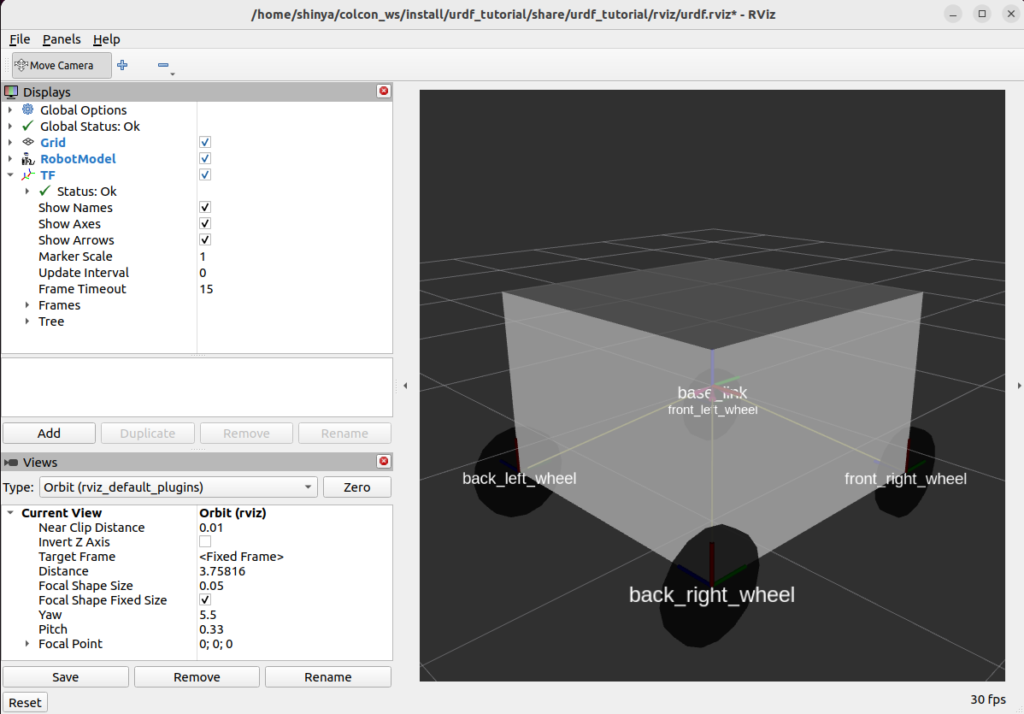
@tiktok_tokyo_jp ROS 2のRviz2 でURDFの2輪駆動シミュレーションをしました。 Done 2 Wheel Drive Simulation with Rviz2 on ROS 2.
♬ オリジナル楽曲 - 武内 晋哉 (Shinya TAKEUCHI)
上の動画について、ROS 2のRviz2 でURDFの2輪駆動シミュレーションをしました。
Above the movie above, I’ve done 2 Wheel Drive Simulation with Rviz2 on ROS 2 using URDF.
2025/1/16
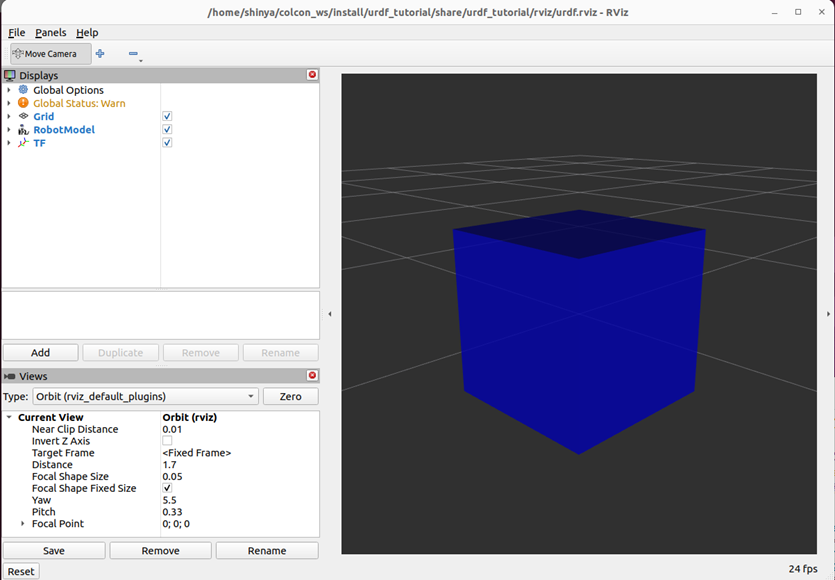
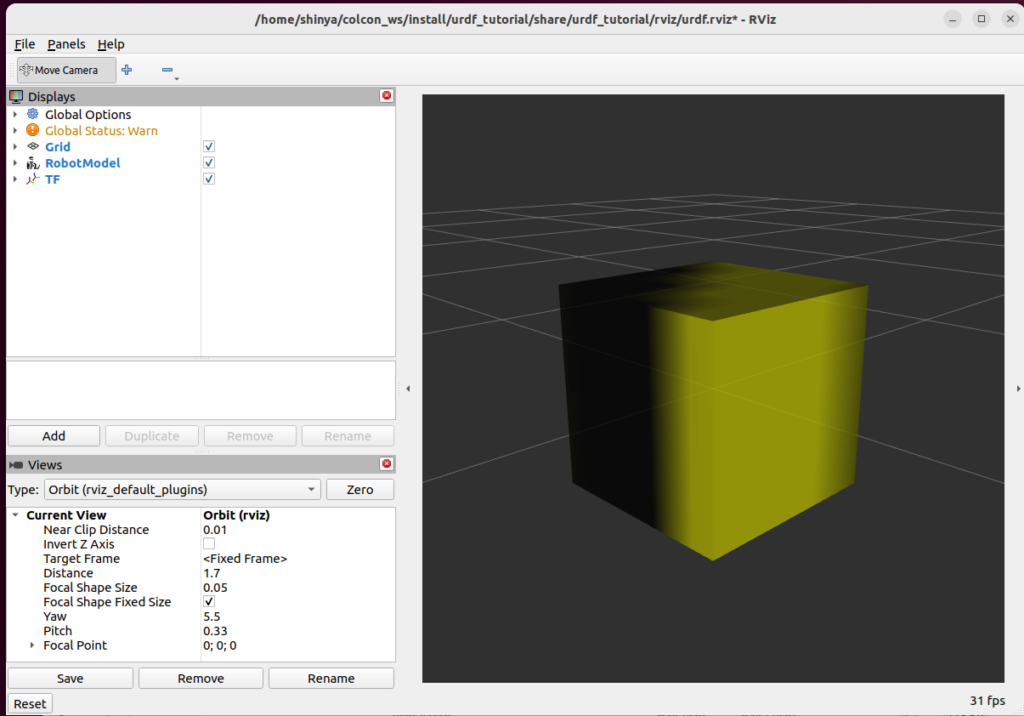
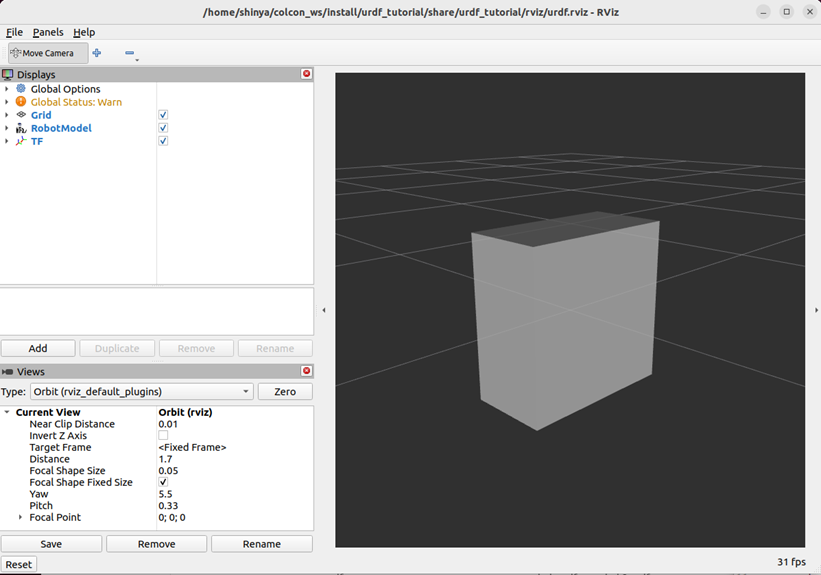
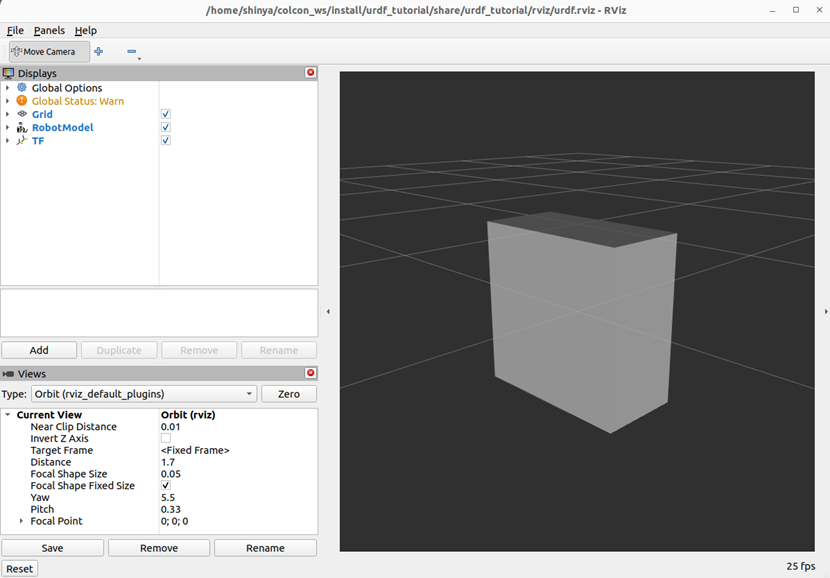
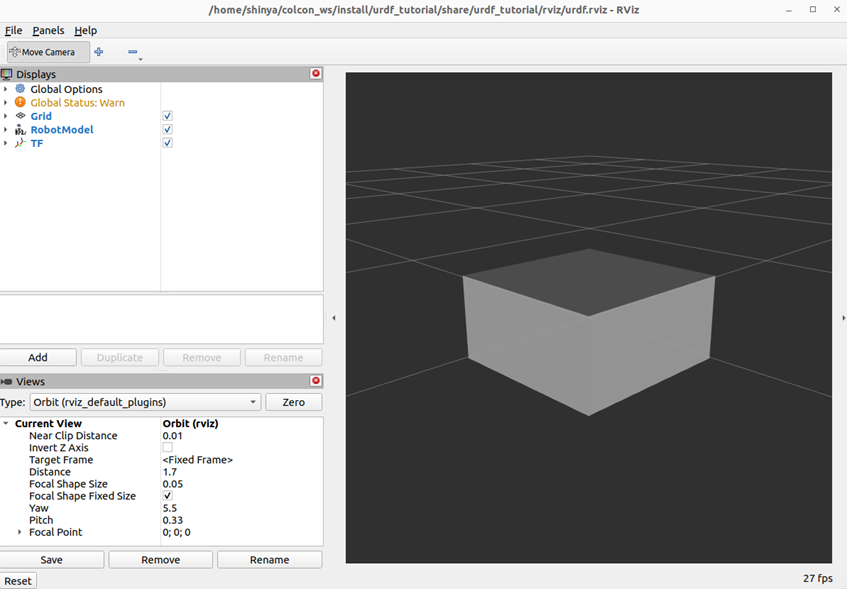
様々な色と形状のURDFモデルを作りました。
(今のところ)画像だけですが、載せます。
次は、立方体の色を変えたものです。
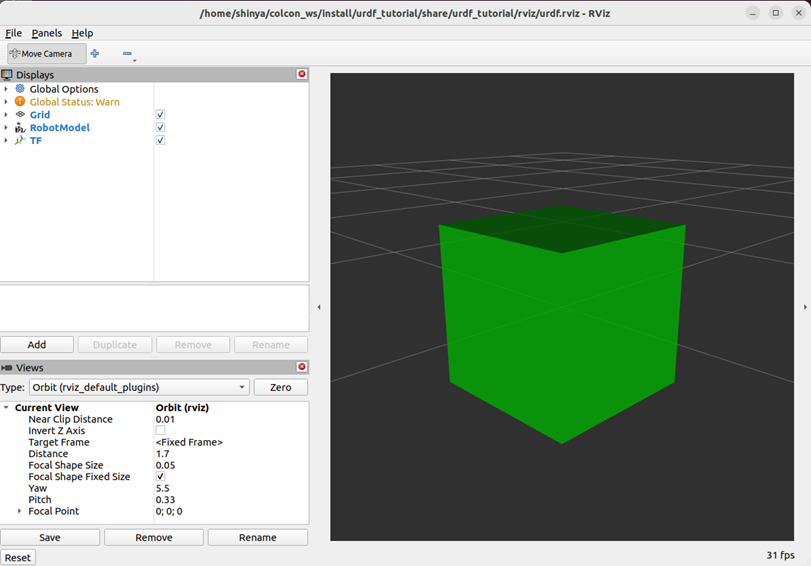
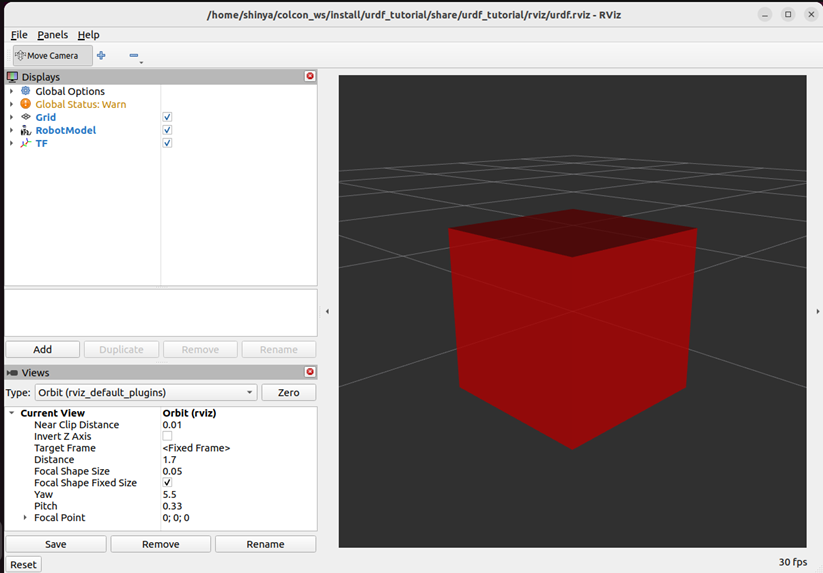
次の一番左は、立方体の色をテクスチャにしたものです。
それ以外は、X・Y・Z軸方向に幅や高さを短くした直方体です。
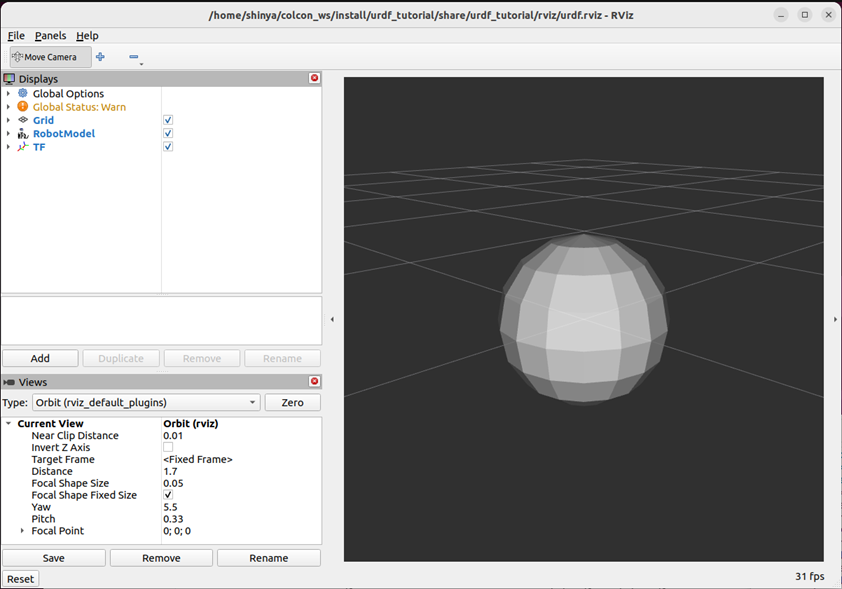
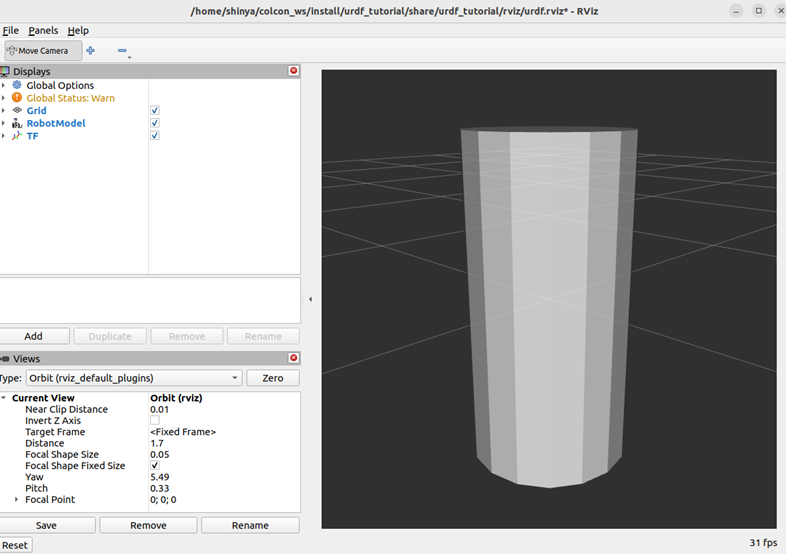
次は、球と円柱です。
次は4輪駆動車です。
2025/1/28
以前作ったのですが、URDFのアームモデルを作りました。
次の動画の通りです。
@tiktok_tokyo_jp ROS 2でロボットアームのURDFモデルを動かしてシミュレーションしました。 Simulated Robot Arm URDF Model of ROS 2.
♬ オリジナル楽曲 - 武内 晋哉 (Shinya TAKEUCHI)
ついでに、先のURDFモデルから、Unity とtwistでクルマを回転させるモノを作りました。
次の動画の通りです。
@tiktok_tokyo_jp ROS 2とUnityの通信と、twistでクルマを回転させました。 Turned the car by ROS 2 & Unity communication and twist.
♬ オリジナル楽曲 - 武内 晋哉 (Shinya TAKEUCHI)
2025/6/9


3Dプリンターで、人間型ロボットの筐体を造形しています。
プラ板で作ればよさそうなモノを、延々と?造形しました。
新しい3Dプリンターが近々届く予定です。
“Bambu Lab“というメーカーから出ているモノがよいと、複数の人が述べていますし、それにしました。 (私の今の3Dプリンターの、少なくとも3倍速は出る?みたいです)
今期最大の設備投資と思います。
(価格は高いといえないとは思いますが、消耗品でなく固定資産扱いになる額を満たしています)
※ “bamboo”ではなく”bambu”です (理由は分かりません)

サーボモーターは、中華人民共和国のモノを、買いました。
︎︎部品は発覚して、仕方ない気がしています。
ロボットを作って動かすのには、日本人的な機械実装能力と、米国人的なシステム・プログラム実装能力と、中国人的な電気電子実装能力があると、有利だといった気が、しています。
–
初号機について、まだ完成はしてませんし、早いかもしれませんけど、2号機をどう開発するのかを考えてしまいます…
初号機は、とりあえず形にして動かす感があると思いますけど、2号機は知能化を考えています。
ただ、どの程度の知能化をはかるか、どういった知能を付けるのか、現在、そんな考えてません。
(音声合成・音声認識は、技術的に付けられるかと思います)
3号機は一部金属とかで作りつつコストを抑えたいところです。
それ以降をどうするのかは、考えてません。
クリフトン・ストレングス・テストの、私の性格分析とか、未来志向がMAXらしいですが。
2025/7/4
上記のように、人間型ロボットの関節について、樹脂を造形して組み立てました。
接合には、次のアクリル・サンデーを使いましたが、机が溶けました。
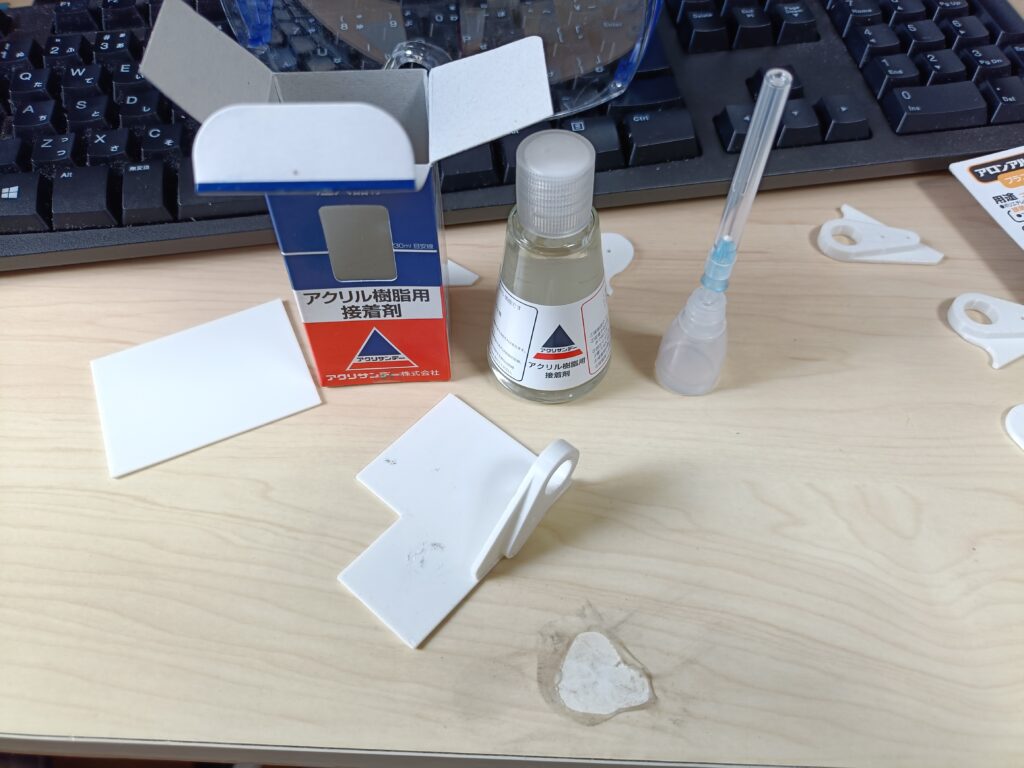

ちなみに、上記のように、Bambu Labのフィラメントが、何周年記念かで、タイムセールを実施していたので、まとめ買いしました。
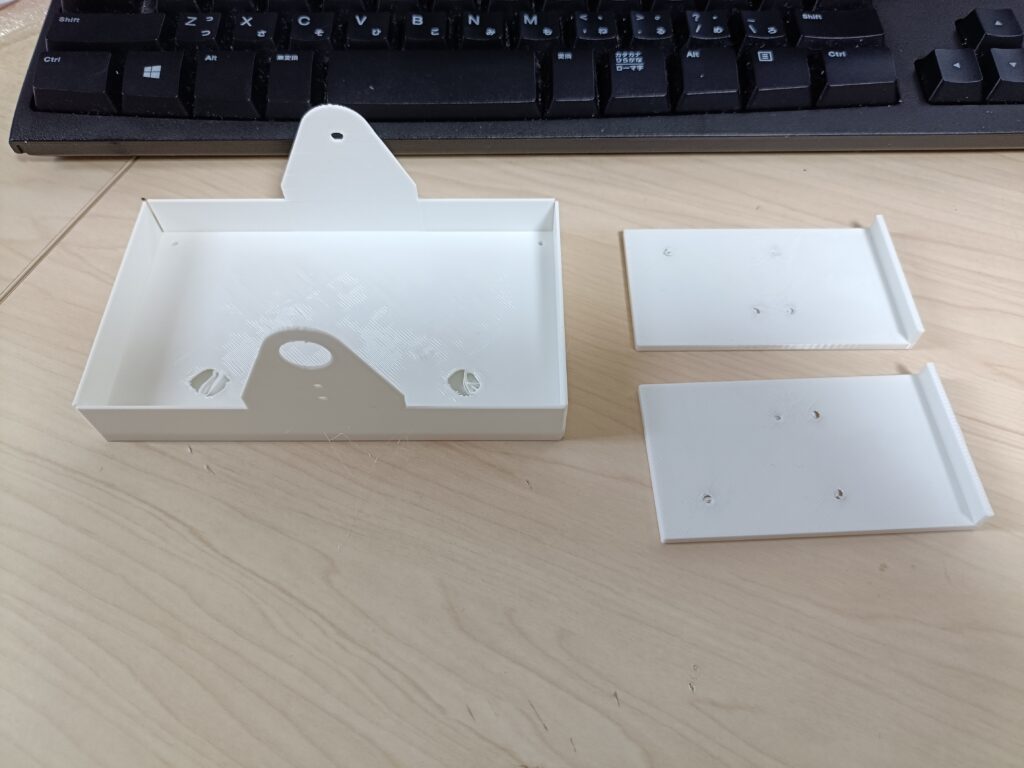
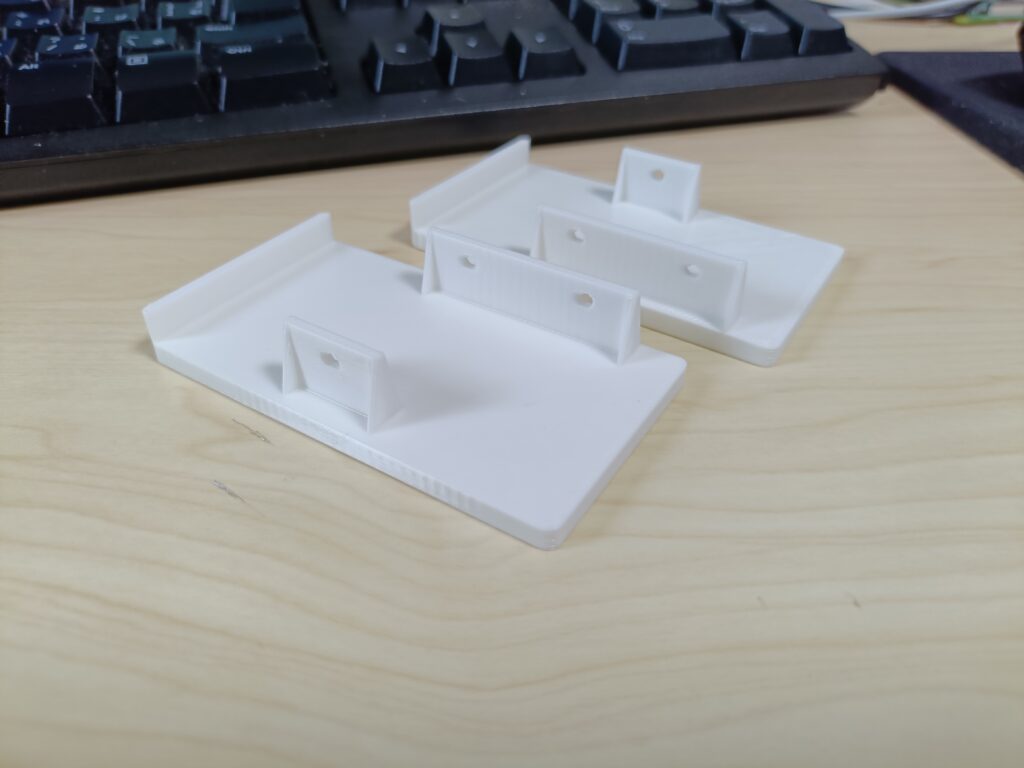
造形した部品です。
更に、プラ板を切って部品組み立てをしています。
何か、ロボットを組み立てている様子を、載せた方が、よいみたいな事を述べていた人が、昔いたので、載せ始めています。
これ位であれば、出来る人も多いと思います。
コアな技術以外ならば、ネットに載せるとトラフィックが増えるとか、
よい影響の方が、将来の事を考えた場合、むしろ多いという話をしていた人がいました。
そのカラクリは「今は」明らかにしないですが。
実は、最初は、マイコン基板に「純」ESP 32を使うつもりでしたが、将来の事を考えて、やめて、ESP 32系の別基板にするかもしれません。
また、将来の事を考えて、電気信号の出力を変える事にするかもしれません。
何で、完成する以前から、将来の事を考えるのか不明ですけどね。
まあ、私とか、未来志向指数がMAXだからでしょうか。よく分かりませんが…
ESP 32系 以降の構想?も思いつき始めています。
2025/8/3
他の人から、タイムマシンについての新しい論文があると言われていたので、
検索したところ、少なくとも、Gigazine というサイトで、ある程度前(3か月以上前??)にあるのを、今更知りましたが、LinkedIn では共有しましたけど、
公開ネットワーク上に共有したかどうかは覚えていないので、共有します。
「過去」を25%の確率で変える逆方向タイムトラベルのシミュレーションにケンブリッジ大学の研究チームが成功
https://gigazine.net/news/20231030-backward-time-travel-successfully/
まあ、量子もつれを利用するらしく、25%の確率で過去から未来の現象を変える「シミュレーション」に成功したとの事です。
但し、シミュレーションが出来たところで、どう具現化するのでしょうか?
3Dプリンターを用意したり、素粒子や電気電子的に動くようにして、現実化するとしても、やはり、難しいはずだという気がします。
といっても、タイムマシン製造が、全くできない話かといいいますと、そういった訳ではないという事なのだろうか??と思いました。
2025/8/12
双腕が完成しました。次は手首を作る必要がありますけどね…
2025/10/14
朝起きる時に、今更気が付いた事で、色々な人に聞いています。
ロボットに「心」を搭載するには、どうしたらよいのか、謎なので、知恵が欲しいと思います。
AI作者に足りないのは「心」だという事です。
心が無いから、自分だけ?が、AIを利用して、知性だけ?身につけては、
自己顕示欲や経済的・物質的な豊かさを満たしては、他の人を下に見ている人もいるという事で、
別に、そういうのを本当に偉くて賢いかといいますと違う事にも気がつきました。
ロボットに健全な心が無いと、おかしい事をし始めそうな事にも、今更気づきました。
よって、弱い人の気持ちが分かって、助けるとか、そういった心をロボットに身に着けさせる事が、
今後、重要になって来ると思います。
よって、ロボットに知性だけでなく、心を身に着けさせる事が課題と思いますから、
それを搭載できるように、自分の心をまず、健全にしたいと思います。
2025/12/8
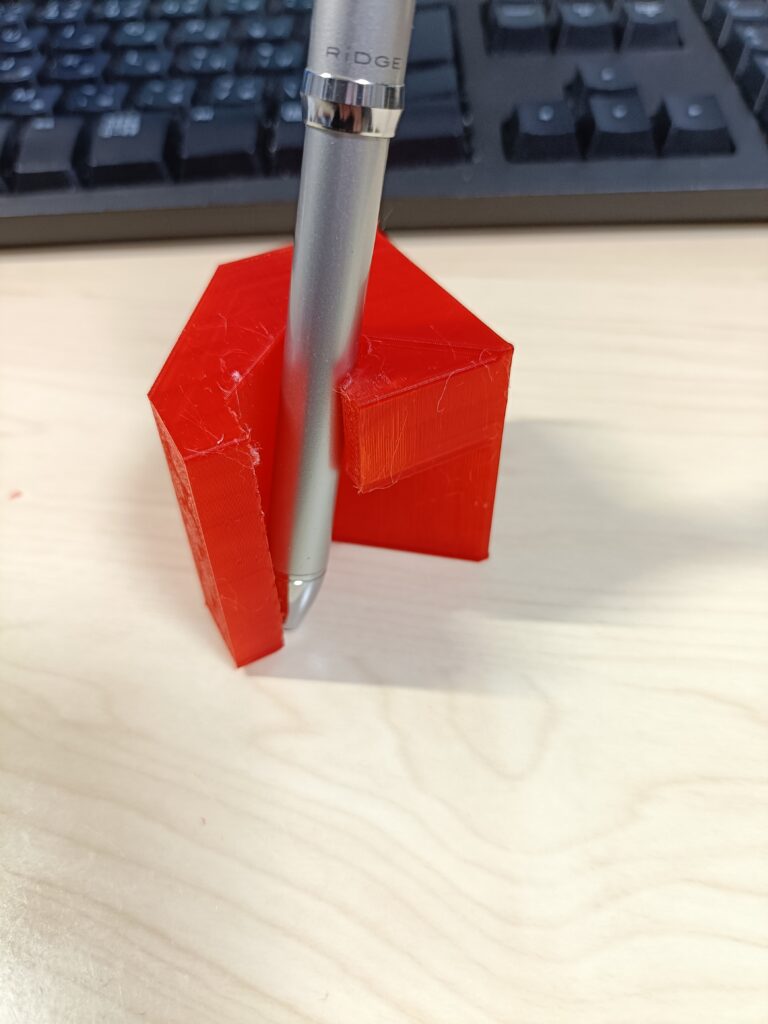
人間型ロボット模型の足関節を組み立てていました。
︎︎やっていて気付く事も多いです。
3Dプリンターや溶剤多用の強度問題も、そうですし、「『ピアノ線』の切断」も大変でした。
単純にペンチでは力を入れても切れず、捻(ひね)りながらでないとダメです

2026/1/8

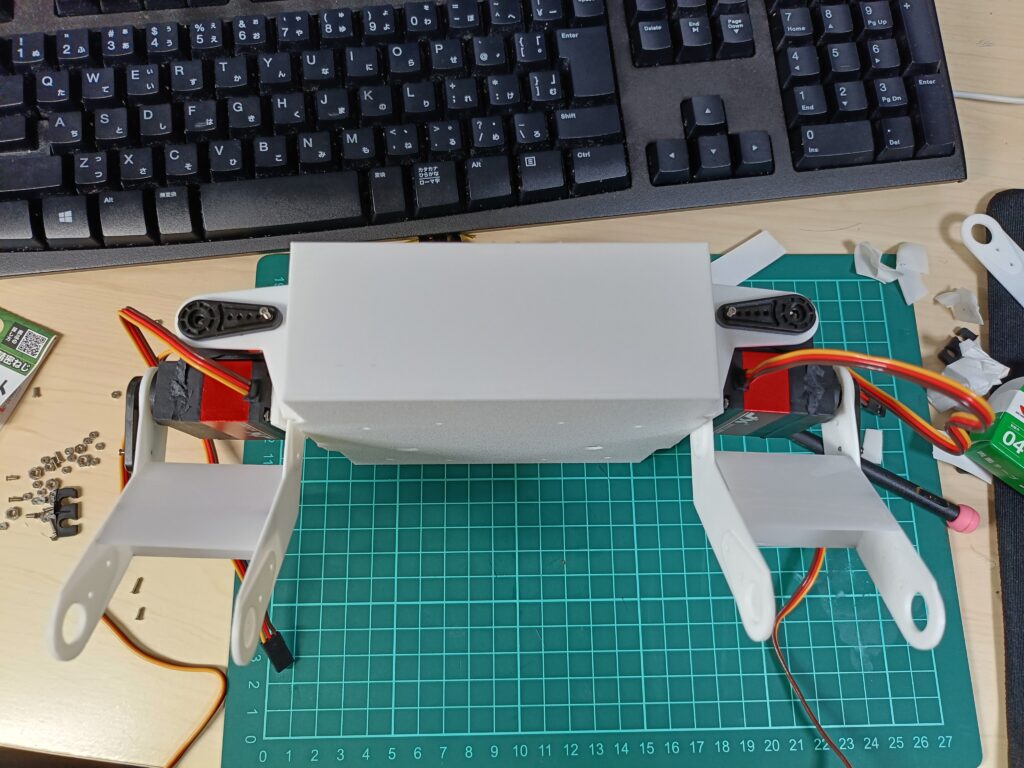
ロボットの両脚が出来てきています。
微?調整が必要ですし、その方が大変かもしれませんが。
Σ(゚д゚;)
2026/1/10
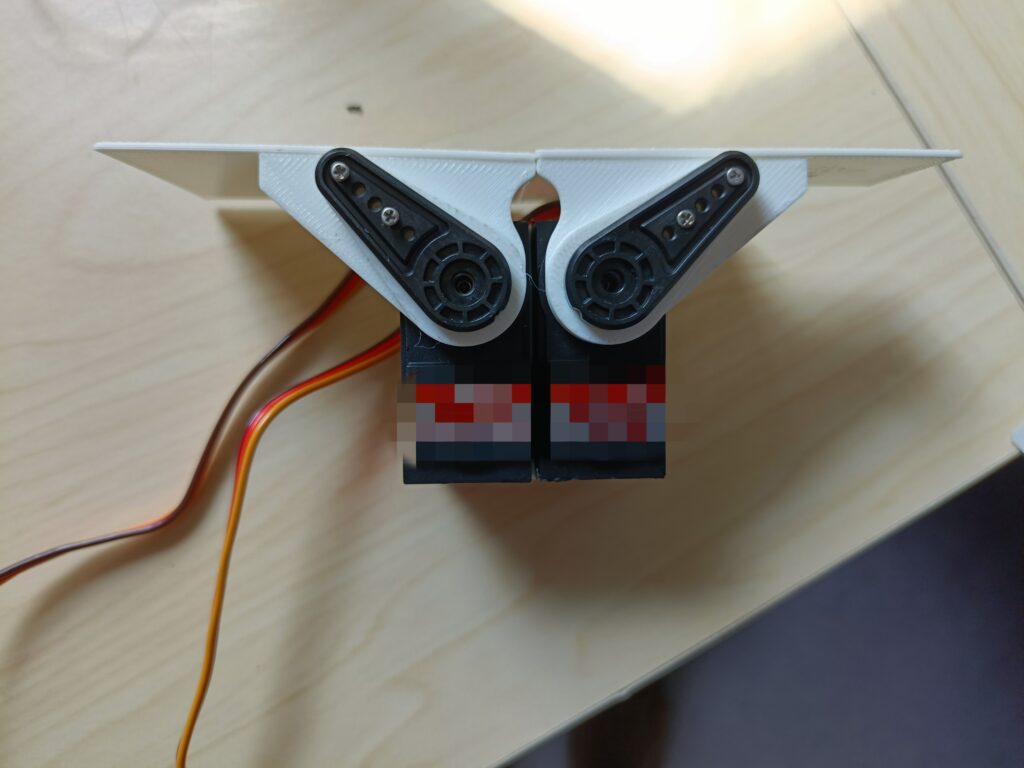
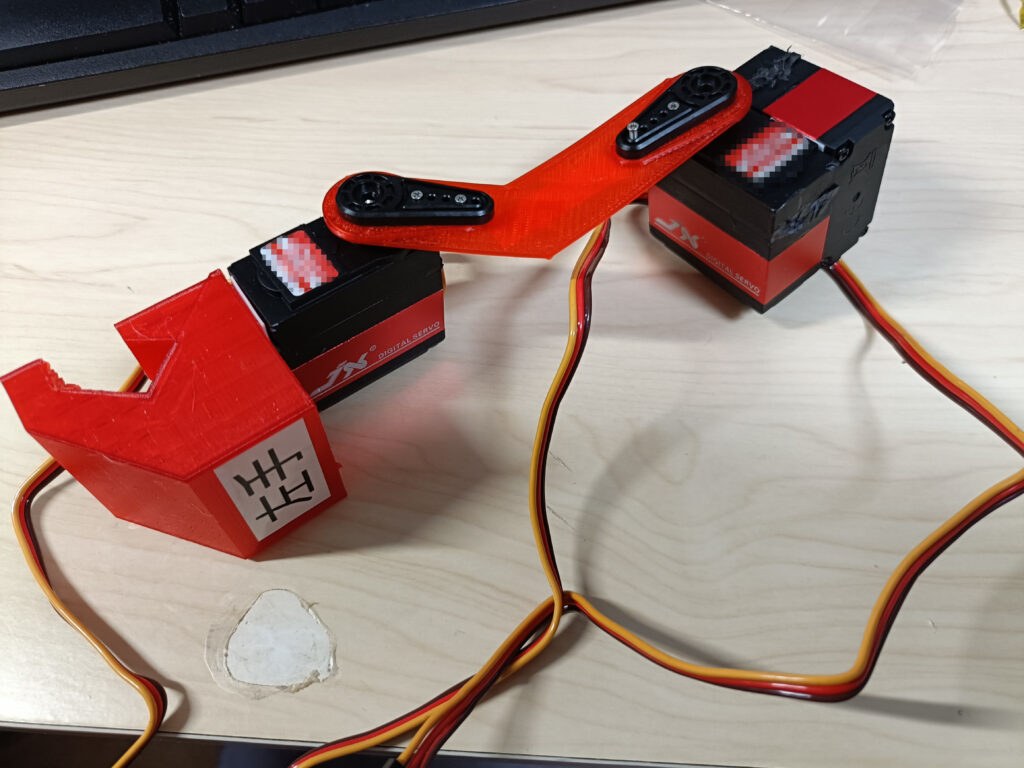
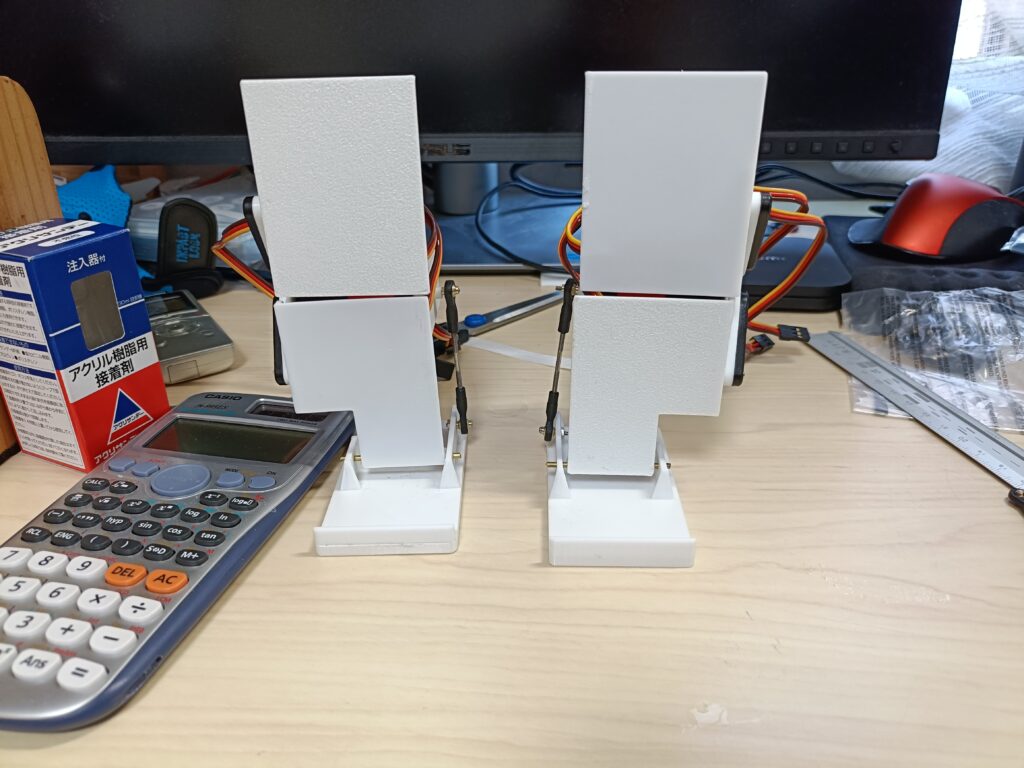
サーボモーターを、0° (度)から1°ずつ角度を増やして、180°に達した時点で、また0°に移動するように制御するプログラムを作り、動くようにしました。 (上の動画 参照)

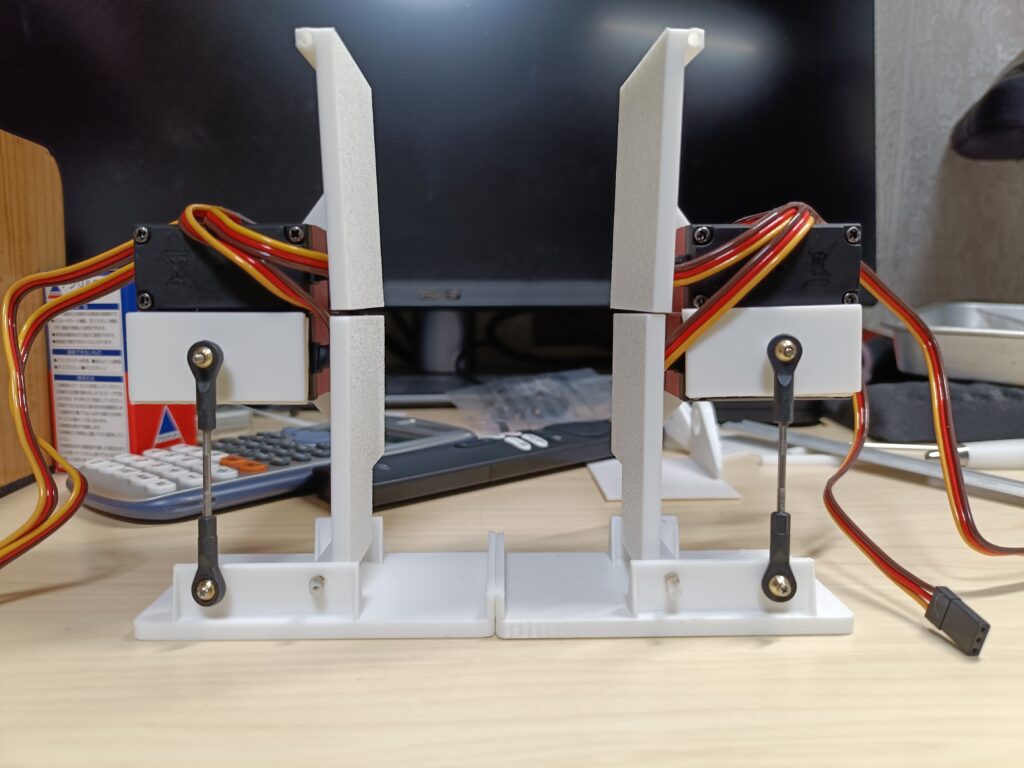
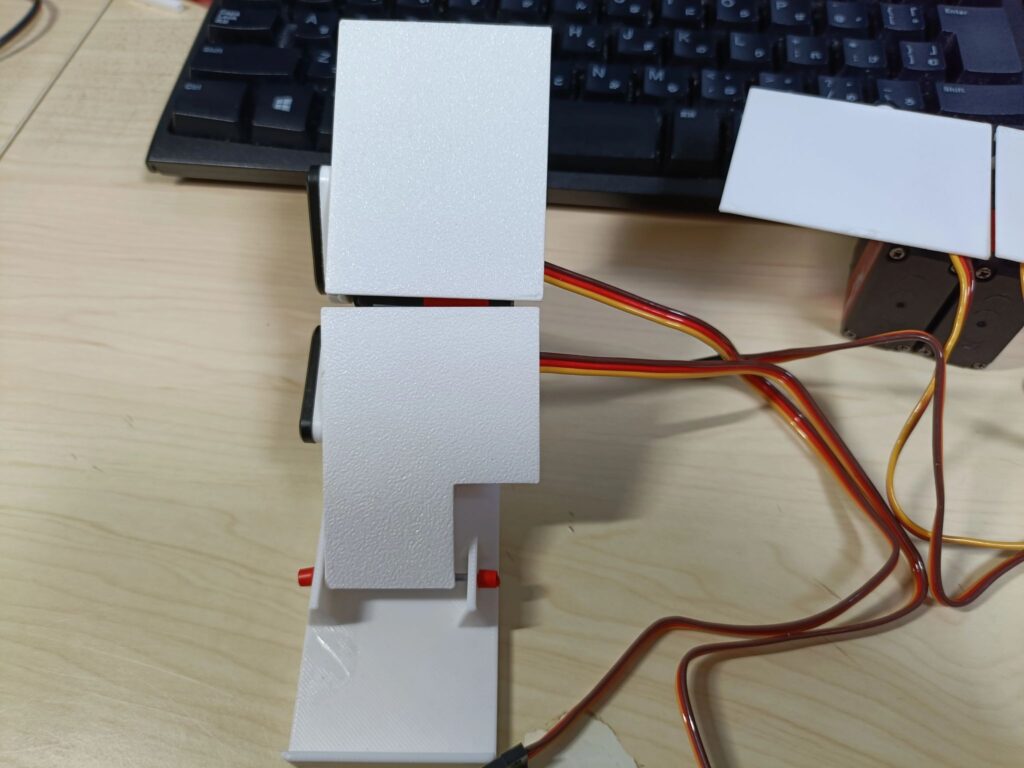
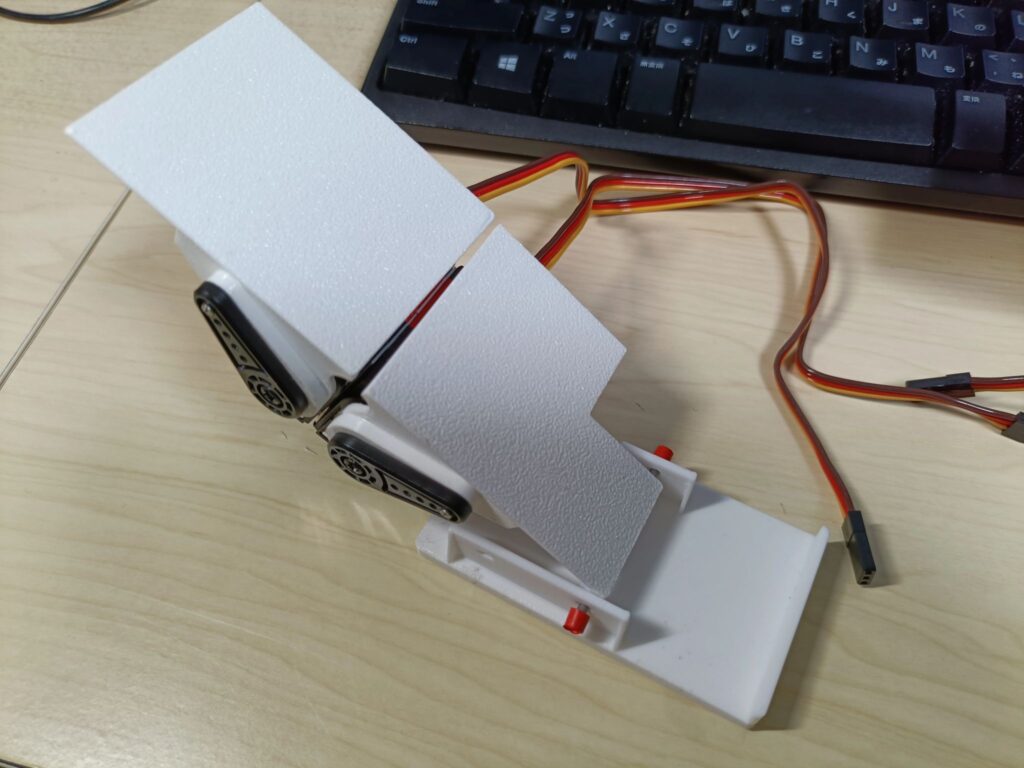
接着剤無しの、一体型の脚を3D CADと3Dプリンター作りました。
デフォルトで地面を底辺とした、長方形となっています。まあ、前からの見た目について、ネジを締める加減で、どうにかなるかと思います。
I made the integrated legs with no glue by 3D CAD and 3D printer.
It’s kept rectangle with the bottom on the ground in default.
And for the view from the front, I think it’ll be fine with loosening or tightening the screws.
2026/1/15
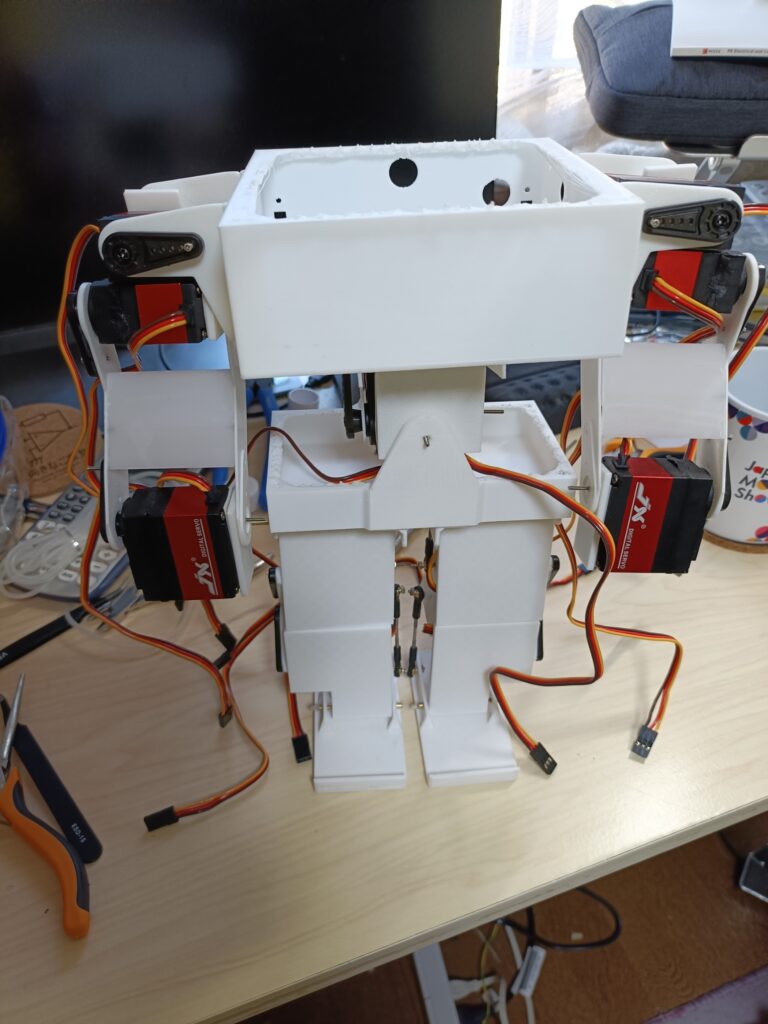
人間型ロボットの筐体が、大体できました。